




ਅਲਟਰਾ ਹਾਈ ਪ੍ਰਿਸੀਜ਼ਨ MZM ਮੋਡੂਲੇਟਰ ਬਿਆਸ ਕੰਟਰੋਲਰ ਆਟੋਮੈਟਿਕ ਬਿਆਸ ਕੰਟਰੋਲਰ


ਵਿਸ਼ੇਸ਼ਤਾ
• ਪੀਕ/ਨਲ/Q+/Q− 'ਤੇ ਬਿਆਸ ਵੋਲਟੇਜ ਕੰਟਰੋਲ
• ਮਨਮਾਨੇ ਬਿੰਦੂ 'ਤੇ ਬਿਆਸ ਵੋਲਟੇਜ ਕੰਟਰੋਲ
• ਅਤਿ-ਸਹੀ ਨਿਯੰਤਰਣ: ਨਲ ਮੋਡ 'ਤੇ 50dB ਵੱਧ ਤੋਂ ਵੱਧ ਐਕਸਟੈਂਸ਼ਨ ਅਨੁਪਾਤ;
Q+ ਅਤੇ Q− ਮੋਡਾਂ 'ਤੇ ±0.5◦ ਸ਼ੁੱਧਤਾ
• ਘੱਟ ਡਿਥਰ ਐਪਲੀਟਿਊਡ:
NULL ਮੋਡ ਅਤੇ PEAK ਮੋਡ 'ਤੇ 0.1% Vπ
Q+ ਮੋਡ ਅਤੇ Q− ਮੋਡ 'ਤੇ 2% Vπ
• ਉੱਚ ਸਥਿਰਤਾ: ਪੂਰੀ ਤਰ੍ਹਾਂ ਡਿਜੀਟਲ ਲਾਗੂਕਰਨ ਦੇ ਨਾਲ
• ਘੱਟ ਪ੍ਰੋਫਾਈਲ: 40mm(W) × 30mm(D) × 10mm(H)
• ਵਰਤਣ ਵਿੱਚ ਆਸਾਨ: ਮਿੰਨੀ ਜੰਪਰ ਨਾਲ ਹੱਥੀਂ ਕਾਰਵਾਈ;
MCU UART2 ਰਾਹੀਂ ਲਚਕਦਾਰ OEM ਕਾਰਜ
• ਬਾਈਸ ਵੋਲਟੇਜ ਪ੍ਰਦਾਨ ਕਰਨ ਲਈ ਦੋ ਵੱਖ-ਵੱਖ ਢੰਗ: a. ਆਟੋਮੈਟਿਕ ਬਾਈਸ ਕੰਟਰੋਲ
b. ਉਪਭੋਗਤਾ ਦੁਆਰਾ ਪਰਿਭਾਸ਼ਿਤ ਪੱਖਪਾਤ ਵੋਲਟੇਜ

ਐਪਲੀਕੇਸ਼ਨ
• LiNbO3 ਅਤੇ ਹੋਰ MZ ਮਾਡਿਊਲੇਟਰ
• ਡਿਜੀਟਲ NRZ, RZ
• ਪਲਸ ਐਪਲੀਕੇਸ਼ਨ
• ਬ੍ਰਿਲੋਇਨ ਸਕੈਟਰਿੰਗ ਸਿਸਟਮ ਅਤੇ ਹੋਰ ਆਪਟੀਕਲ ਸੈਂਸਰ
• CATV ਟ੍ਰਾਂਸਮੀਟਰ
ਪ੍ਰਦਰਸ਼ਨ
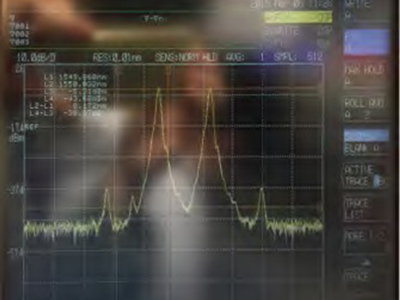
ਚਿੱਤਰ 1. ਕੈਰੀਅਰ ਸਪ੍ਰੈਸ਼ਨ
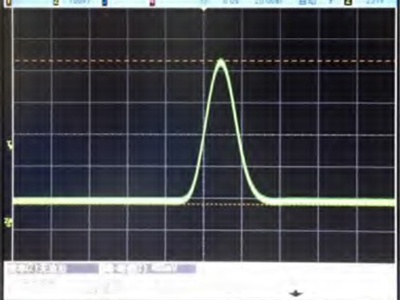
ਚਿੱਤਰ 2. ਪਲਸ ਜਨਰੇਸ਼ਨ

ਚਿੱਤਰ 3. ਮੋਡਿਊਲੇਟਰ ਅਧਿਕਤਮ ਸ਼ਕਤੀ
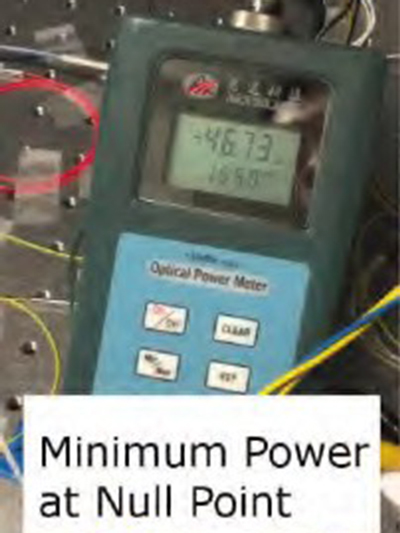
ਚਿੱਤਰ 4. ਮਾਡਿਊਲੇਟਰ ਘੱਟੋ-ਘੱਟ ਪਾਵਰ
ਮੈਕਸਿਮ ਡੀਸੀ ਵਿਨਾਸ਼ ਅਨੁਪਾਤ
ਇਸ ਪ੍ਰਯੋਗ ਵਿੱਚ, ਸਿਸਟਮ ਤੇ ਕੋਈ RF ਸਿਗਨਲ ਲਾਗੂ ਨਹੀਂ ਕੀਤੇ ਗਏ ਸਨ। ਸ਼ੁੱਧ DC ਐਕਸਟਿੰਸੀਟਨ ਨੂੰ ਮਾਪਿਆ ਗਿਆ ਹੈ।
1. ਚਿੱਤਰ 5 ਮੋਡਿਊਲੇਟਰ ਆਉਟਪੁੱਟ ਦੀ ਆਪਟੀਕਲ ਪਾਵਰ ਦਰਸਾਉਂਦਾ ਹੈ, ਜਦੋਂ ਮੋਡਿਊਲੇਟਰ ਨੂੰ ਪੀਕ ਪੁਆਇੰਟ 'ਤੇ ਕੰਟਰੋਲ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਇਹ ਚਿੱਤਰ ਵਿੱਚ 3.71dBm ਦਰਸਾਉਂਦਾ ਹੈ।
2. ਚਿੱਤਰ 6 ਮਾਡਿਊਲੇਟਰ ਆਉਟਪੁੱਟ ਦੀ ਆਪਟੀਕਲ ਪਾਵਰ ਦਰਸਾਉਂਦਾ ਹੈ, ਜਦੋਂ ਮਾਡਿਊਲੇਟਰ ਨੂੰ ਨਲ ਪੁਆਇੰਟ 'ਤੇ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਇਹ ਚਿੱਤਰ ਵਿੱਚ -46.73dBm ਦਰਸਾਉਂਦਾ ਹੈ। ਅਸਲ ਪ੍ਰਯੋਗ ਵਿੱਚ, ਮੁੱਲ -47dBm ਦੇ ਆਲੇ-ਦੁਆਲੇ ਬਦਲਦਾ ਹੈ; ਅਤੇ -46.73 ਇੱਕ ਸਥਿਰ ਮੁੱਲ ਹੈ।
3. ਇਸ ਲਈ, ਮਾਪਿਆ ਗਿਆ ਸਥਿਰ DC ਵਿਨਾਸ਼ ਅਨੁਪਾਤ 50.4dB ਹੈ।
ਉੱਚ ਵਿਨਾਸ਼ ਅਨੁਪਾਤ ਲਈ ਲੋੜਾਂ
1. ਸਿਸਟਮ ਮਾਡਿਊਲੇਟਰ ਵਿੱਚ ਉੱਚ ਵਿਨਾਸ਼ ਅਨੁਪਾਤ ਹੋਣਾ ਚਾਹੀਦਾ ਹੈ। ਸਿਸਟਮ ਮਾਡਿਊਲੇਟਰ ਦੀ ਵਿਸ਼ੇਸ਼ਤਾ ਇਹ ਨਿਰਧਾਰਤ ਕਰਦੀ ਹੈ ਕਿ ਵੱਧ ਤੋਂ ਵੱਧ ਵਿਨਾਸ਼ ਅਨੁਪਾਤ ਪ੍ਰਾਪਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
2. ਮਾਡਿਊਲੇਟਰ ਇਨਪੁਟ ਲਾਈਟ ਦੇ ਧਰੁਵੀਕਰਨ ਦਾ ਧਿਆਨ ਰੱਖਿਆ ਜਾਵੇਗਾ। ਮਾਡਿਊਲੇਟਰ ਧਰੁਵੀਕਰਨ ਪ੍ਰਤੀ ਸੰਵੇਦਨਸ਼ੀਲ ਹੁੰਦੇ ਹਨ। ਸਹੀ ਧਰੁਵੀਕਰਨ 10dB ਤੋਂ ਵੱਧ ਵਿਨਾਸ਼ ਅਨੁਪਾਤ ਨੂੰ ਬਿਹਤਰ ਬਣਾ ਸਕਦਾ ਹੈ। ਪ੍ਰਯੋਗਸ਼ਾਲਾ ਪ੍ਰਯੋਗਾਂ ਵਿੱਚ, ਆਮ ਤੌਰ 'ਤੇ ਇੱਕ ਧਰੁਵੀਕਰਨ ਕੰਟਰੋਲਰ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ।
3. ਸਹੀ ਬਾਈਸ ਕੰਟਰੋਲਰ। ਸਾਡੇ ਡੀਸੀ ਐਕਸਟੈਂਸ਼ਨ ਰੇਸ਼ੋ ਪ੍ਰਯੋਗ ਵਿੱਚ, 50.4dB ਐਕਸਟੈਂਸ਼ਨ ਰੇਸ਼ੋ ਪ੍ਰਾਪਤ ਕੀਤਾ ਗਿਆ ਹੈ। ਜਦੋਂ ਕਿ ਮਾਡਿਊਲੇਟਰ ਨਿਰਮਾਣ ਦੀ ਡੇਟਾਸ਼ੀਟ ਸਿਰਫ 40dB ਦੀ ਸੂਚੀ ਦਿੰਦੀ ਹੈ। ਇਸ ਸੁਧਾਰ ਦਾ ਕਾਰਨ ਇਹ ਹੈ ਕਿ ਕੁਝ ਮਾਡਿਊਲੇਟਰ ਬਹੁਤ ਤੇਜ਼ੀ ਨਾਲ ਡ੍ਰਿਫਟ ਹੁੰਦੇ ਹਨ। ਰੋਫੀਆ ਆਰ-ਬੀਸੀ-ਏਨੀ ਬਾਈਸ ਕੰਟਰੋਲਰ ਫਾਸਟ ਟਰੈਕ ਰਿਸਪਾਂਸ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਹਰ 1 ਸਕਿੰਟ ਵਿੱਚ ਬਾਈਸ ਵੋਲਟੇਜ ਨੂੰ ਅਪਡੇਟ ਕਰਦੇ ਹਨ।
ਨਿਰਧਾਰਨ
| ਪੈਰਾਮੀਟਰ | ਘੱਟੋ-ਘੱਟ | ਕਿਸਮ | ਵੱਧ ਤੋਂ ਵੱਧ | ਯੂਨਿਟ | ਹਾਲਾਤ |
| ਪ੍ਰਦਰਸ਼ਨ ਨੂੰ ਕੰਟਰੋਲ ਕਰੋ | |||||
| ਵਿਨਾਸ਼ ਅਨੁਪਾਤ | ਐਮਈਆਰ 1 | 50 | dB | ||
| ਸੀਐਸਓ2 | −55 | −65 | −70 | ਡੀਬੀਸੀ | ਡਿਥਰ ਐਪਲੀਟਿਊਡ: 2%Vπ |
| ਸਥਿਰਤਾ ਸਮਾਂ | 4 | s | ਟਰੈਕਿੰਗ ਪੁਆਇੰਟ: ਨਲ ਅਤੇ ਪੀਕ | ||
| 10 | ਟਰੈਕਿੰਗ ਪੁਆਇੰਟ: Q+ ਅਤੇ Q- | ||||
| ਇਲੈਕਟ੍ਰੀਕਲ | |||||
| ਸਕਾਰਾਤਮਕ ਪਾਵਰ ਵੋਲਟੇਜ | +14.5 | +15 | +15.5 | V | |
| ਸਕਾਰਾਤਮਕ ਪਾਵਰ ਕਰੰਟ | 20 | 30 | mA | ||
| ਨਕਾਰਾਤਮਕ ਪਾਵਰ ਵੋਲਟੇਜ | -15.5 | -15 | -14.5 | V | |
| ਨਕਾਰਾਤਮਕ ਪਾਵਰ ਕਰੰਟ | 2 | 4 | mA | ||
| ਆਉਟਪੁੱਟ ਵੋਲਟੇਜ ਸੀਮਾ | -9.57 | +9.85 | V | ||
| ਆਉਟਪੁੱਟ ਵੋਲਟੇਜ ਸ਼ੁੱਧਤਾ | 346 | µV | |||
| ਡਿਥਰ ਫ੍ਰੀਕੁਐਂਸੀ | 999.95 | 1000 | 1000.05 | Hz | ਸੰਸਕਰਣ: 1kHz ਡਾਇਦਰ ਸਿਗਨਲ |
| ਡਿਥਰ ਐਪਲੀਟਿਊਡ | 0.1% ਵੀπ | V | ਟਰੈਕਿੰਗ ਪੁਆਇੰਟ: ਨਲ ਅਤੇ ਪੀਕ | ||
| 2% ਵੀπ | ਟਰੈਕਿੰਗ ਪੁਆਇੰਟ: Q+ ਅਤੇ Q- | ||||
| ਆਪਟੀਕਲ | |||||
| ਇਨਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ3 | -30 | -5 | ਡੀਬੀਐਮ | ||
| ਇਨਪੁੱਟ ਤਰੰਗ-ਲੰਬਾਈ | 780 | 2000 | nm | ||
1. MER ਮਾਡਿਊਲੇਟਰ ਐਕਸਟਿੰਕਸ਼ਨ ਰੇਸ਼ੋ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ। ਪ੍ਰਾਪਤ ਕੀਤਾ ਐਕਸਟੈਂਸ਼ਨ ਰੇਸ਼ੋ ਆਮ ਤੌਰ 'ਤੇ ਮਾਡਿਊਲੇਟਰ ਡੇਟਾਸ਼ੀਟ ਵਿੱਚ ਦਰਸਾਏ ਗਏ ਮੋਡਿਊਲੇਟਰ ਦਾ ਐਕਸਟੈਂਸ਼ਨ ਰੇਸ਼ੋ ਹੁੰਦਾ ਹੈ।
2. CSO ਕੰਪੋਜ਼ਿਟ ਦੂਜੇ ਕ੍ਰਮ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ। CSO ਨੂੰ ਸਹੀ ਢੰਗ ਨਾਲ ਮਾਪਣ ਲਈ, RF ਸਿਗਨਲ, ਮਾਡਿਊਲੇਟਰਾਂ ਅਤੇ ਰਿਸੀਵਰਾਂ ਦੀ ਰੇਖਿਕ ਗੁਣਵੱਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਇਆ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ। ਇਸ ਤੋਂ ਇਲਾਵਾ, ਵੱਖ-ਵੱਖ RF ਫ੍ਰੀਕੁਐਂਸੀ 'ਤੇ ਚੱਲਣ ਵੇਲੇ ਸਿਸਟਮ CSO ਰੀਡਿੰਗ ਵੱਖ-ਵੱਖ ਹੋ ਸਕਦੇ ਹਨ।
3. ਕਿਰਪਾ ਕਰਕੇ ਧਿਆਨ ਦਿਓ ਕਿ ਇਨਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਚੁਣੇ ਹੋਏ ਬਾਈਸ ਪੁਆਇੰਟ 'ਤੇ ਆਪਟੀਕਲ ਪਾਵਰ ਨਾਲ ਮੇਲ ਨਹੀਂ ਖਾਂਦਾ। ਇਹ ਵੱਧ ਤੋਂ ਵੱਧ ਆਪਟੀਕਲ ਪਾਵਰ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ ਜੋ ਮੋਡਿਊਲੇਟਰ ਕੰਟਰੋਲਰ ਨੂੰ ਨਿਰਯਾਤ ਕਰ ਸਕਦਾ ਹੈ ਜਦੋਂ ਬਾਈਸ ਵੋਲਟੇਜ −Vπ ਤੋਂ +Vπ ਤੱਕ ਹੁੰਦਾ ਹੈ।
ਯੂਜ਼ਰ ਇੰਟਰਫੇਸ
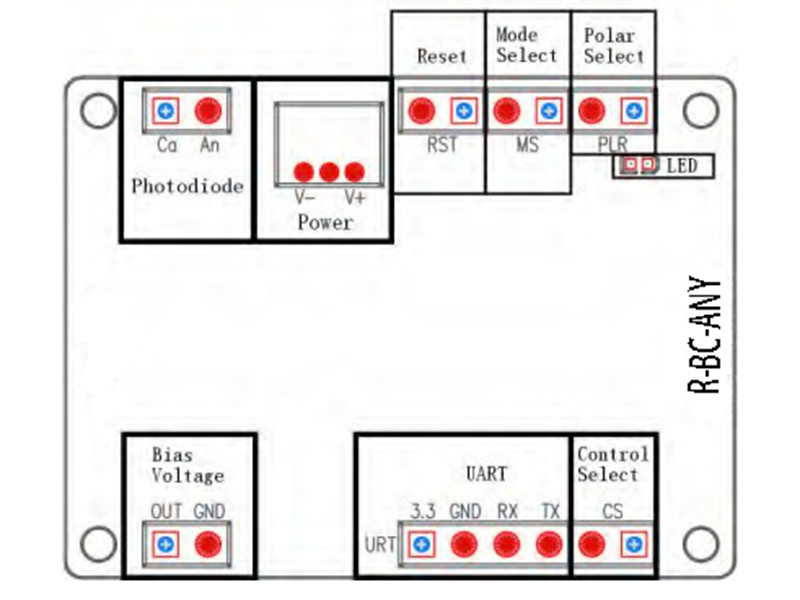
ਚਿੱਤਰ 5. ਅਸੈਂਬਲੀ
| ਸਮੂਹ | ਓਪਰੇਸ਼ਨ | ਵਿਆਖਿਆ |
| ਫੋਟੋਡਾਇਓਡ 1 | PD: MZM ਫੋਟੋਡੀਓਡ ਦੇ ਕੈਥੋਡ ਨੂੰ ਕਨੈਕਟ ਕਰੋ | ਫੋਟੋਕਰੰਟ ਫੀਡਬੈਕ ਪ੍ਰਦਾਨ ਕਰੋ |
| GND: MZM ਫੋਟੋਡੀਓਡ ਦੇ ਐਨੋਡ ਨੂੰ ਕਨੈਕਟ ਕਰੋ | ||
| ਪਾਵਰ | ਪੱਖਪਾਤ ਕੰਟਰੋਲਰ ਲਈ ਪਾਵਰ ਸਰੋਤ | V-: ਨਕਾਰਾਤਮਕ ਇਲੈਕਟ੍ਰੋਡ ਨੂੰ ਜੋੜਦਾ ਹੈ |
| V+: ਸਕਾਰਾਤਮਕ ਇਲੈਕਟ੍ਰੋਡ ਨੂੰ ਜੋੜਦਾ ਹੈ | ||
| ਵਿਚਕਾਰਲਾ ਪ੍ਰੋਬ: ਜ਼ਮੀਨੀ ਇਲੈਕਟ੍ਰੋਡ ਨੂੰ ਜੋੜਦਾ ਹੈ | ||
| ਰੀਸੈੱਟ | ਜੰਪਰ ਪਾਓ ਅਤੇ 1 ਸਕਿੰਟ ਬਾਅਦ ਬਾਹਰ ਕੱਢੋ। | ਕੰਟਰੋਲਰ ਰੀਸੈਟ ਕਰੋ |
| ਮੋਡ ਚੋਣ | ਜੰਪਰ ਪਾਓ ਜਾਂ ਬਾਹਰ ਕੱਢੋ | ਕੋਈ ਜੰਪਰ ਨਹੀਂ: ਨਲ ਮੋਡ; ਜੰਪਰ ਦੇ ਨਾਲ: ਕਵਾਡ ਮੋਡ |
| ਪੋਲਰ ਸਿਲੈਕਟ2 | ਜੰਪਰ ਪਾਓ ਜਾਂ ਬਾਹਰ ਕੱਢੋ | ਕੋਈ ਜੰਪਰ ਨਹੀਂ: ਸਕਾਰਾਤਮਕ ਪੋਲਰ; ਜੰਪਰ ਦੇ ਨਾਲ: ਨੈਗੇਟਿਵ ਪੋਲਰ |
| ਬਿਆਸ ਵੋਲਟੇਜ | MZM ਬਾਈਸ ਵੋਲਟੇਜ ਪੋਰਟ ਨਾਲ ਜੁੜੋ | OUT ਅਤੇ GND ਮੋਡੂਲੇਟਰ ਲਈ ਬਾਈਸ ਵੋਲਟੇਜ ਪ੍ਰਦਾਨ ਕਰਦੇ ਹਨ। |
| ਅਗਵਾਈ | ਲਗਾਤਾਰ ਚਾਲੂ | ਸਥਿਰ ਸਥਿਤੀ ਵਿੱਚ ਕੰਮ ਕਰਨਾ |
| ਹਰ 0.2 ਸਕਿੰਟ ਬਾਅਦ ਚਾਲੂ-ਬੰਦ ਜਾਂ ਬੰਦ-ਚਾਲੂ | ਡੇਟਾ ਦੀ ਪ੍ਰਕਿਰਿਆ ਕਰਨਾ ਅਤੇ ਕੰਟਰੋਲਿੰਗ ਬਿੰਦੂ ਦੀ ਖੋਜ ਕਰਨਾ | |
| ਹਰ 1 ਸਕਿੰਟ ਬਾਅਦ ਚਾਲੂ-ਬੰਦ ਜਾਂ ਬੰਦ-ਬੰਦ | ਇਨਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਬਹੁਤ ਕਮਜ਼ੋਰ ਹੈ। | |
| ਹਰ 3 ਸਕਿੰਟ ਬਾਅਦ ਚਾਲੂ-ਬੰਦ ਜਾਂ ਬੰਦ-ਚਾਲੂ | ਇਨਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਬਹੁਤ ਜ਼ਿਆਦਾ ਹੈ। | |
| ਯੂਆਰਟੀ | UART ਰਾਹੀਂ ਕੰਟਰੋਲਰ ਚਲਾਓ | 3.3: 3.3V ਸੰਦਰਭ ਵੋਲਟੇਜ |
| GND: ਜ਼ਮੀਨ | ||
| RX: ਕੰਟਰੋਲਰ ਦੀ ਪ੍ਰਾਪਤੀ | ||
| TX: ਕੰਟਰੋਲਰ ਦਾ ਸੰਚਾਰ | ||
| ਕੰਟਰੋਲ ਚੋਣ | ਜੰਪਰ ਪਾਓ ਜਾਂ ਬਾਹਰ ਕੱਢੋ | ਕੋਈ ਜੰਪਰ ਨਹੀਂ: ਜੰਪਰ ਕੰਟਰੋਲ; ਜੰਪਰ ਦੇ ਨਾਲ: UART ਕੰਟਰੋਲ |
1. ਕੁਝ MZ ਮਾਡਿਊਲੇਟਰਾਂ ਵਿੱਚ ਅੰਦਰੂਨੀ ਫੋਟੋਡਾਇਓਡ ਹੁੰਦੇ ਹਨ। ਕੰਟਰੋਲਰ ਸੈੱਟਅੱਪ ਨੂੰ ਕੰਟਰੋਲਰ ਦੇ ਫੋਟੋਡਾਇਓਡ ਦੀ ਵਰਤੋਂ ਜਾਂ ਮੋਡਿਊਲੇਟਰ ਦੇ ਅੰਦਰੂਨੀ ਫੋਟੋਡਾਇਓਡ ਦੀ ਵਰਤੋਂ ਦੇ ਵਿਚਕਾਰ ਚੁਣਿਆ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ। ਦੋ ਕਾਰਨਾਂ ਕਰਕੇ ਲੈਬ ਪ੍ਰਯੋਗਾਂ ਲਈ ਕੰਟਰੋਲਰ ਦੇ ਫੋਟੋਡਾਇਓਡ ਦੀ ਵਰਤੋਂ ਕਰਨ ਦੀ ਸਿਫਾਰਸ਼ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਪਹਿਲਾਂ, ਕੰਟਰੋਲਰ ਫੋਟੋਡਾਇਓਡ ਨੇ ਗੁਣਵੱਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਇਆ ਹੈ। ਦੂਜਾ, ਇਨਪੁਟ ਲਾਈਟ ਇੰਟੈਂਟਸਿਟੀ ਨੂੰ ਐਡਜਸਟ ਕਰਨਾ ਆਸਾਨ ਹੈ। ਨੋਟ: ਜੇਕਰ ਮੋਡਿਊਲੇਟਰ ਦੇ ਅੰਦਰੂਨੀ ਫੋਟੋਡਾਇਓਡ ਦੀ ਵਰਤੋਂ ਕਰ ਰਹੇ ਹੋ, ਤਾਂ ਕਿਰਪਾ ਕਰਕੇ ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਫੋਟੋਡਾਇਓਡ ਦਾ ਆਉਟਪੁੱਟ ਕਰੰਟ ਇਨਪੁਟ ਪਾਵਰ ਦੇ ਬਿਲਕੁਲ ਅਨੁਪਾਤੀ ਹੈ।
2. ਪੋਲਰ ਪਿੰਨ ਦੀ ਵਰਤੋਂ ਨਲ ਕੰਟਰੋਲ ਮੋਡ (ਮੋਡ ਸਿਲੈਕਟ ਪਿੰਨ ਦੁਆਰਾ ਨਿਰਧਾਰਤ) ਜਾਂ ਕਵਾਡ+ ਵਿੱਚ ਪੀਕ ਅਤੇ ਨਲ ਵਿਚਕਾਰ ਕੰਟਰੋਲ ਪੁਆਇੰਟ ਨੂੰ ਬਦਲਣ ਲਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
ਅਤੇ ਕਵਾਡ- ਕਵਾਡ ਕੰਟਰੋਲ ਮੋਡ ਵਿੱਚ। ਜੇਕਰ ਪੋਲਰ ਪਿੰਨ ਦਾ ਜੰਪਰ ਨਹੀਂ ਪਾਇਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਕੰਟਰੋਲ ਪੁਆਇੰਟ ਨਲ ਮੋਡ ਵਿੱਚ ਨਲ ਜਾਂ ਕਵਾਡ ਮੋਡ ਵਿੱਚ ਕਵਾਡ+ ਹੋਵੇਗਾ। RF ਸਿਸਟਮ ਦਾ ਐਪਲੀਟਿਊਡ ਵੀ ਕੰਟਰੋਲ ਪੁਆਇੰਟ ਨੂੰ ਪ੍ਰਭਾਵਿਤ ਕਰੇਗਾ। ਜਦੋਂ ਕੋਈ RF ਸਿਗਨਲ ਨਹੀਂ ਹੁੰਦਾ ਜਾਂ RF ਸਿਗਨਲ ਐਪਲੀਟਿਊਡ ਛੋਟਾ ਹੁੰਦਾ ਹੈ, ਤਾਂ ਕੰਟਰੋਲਰ MS ਅਤੇ PLR ਜੰਪਰ ਦੁਆਰਾ ਚੁਣੇ ਗਏ ਵਰਕ ਪੁਆਇੰਟ ਨੂੰ ਸਹੀ ਬਿੰਦੂ 'ਤੇ ਲਾਕ ਕਰਨ ਦੇ ਯੋਗ ਹੁੰਦਾ ਹੈ। ਜਦੋਂ RF ਸਿਗਨਲ ਐਪਲੀਟਿਊਡ ਕੁਝ ਹੱਦ ਤੋਂ ਵੱਧ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਸਿਸਟਮ ਦਾ ਪੋਲਰ ਬਦਲਿਆ ਜਾਵੇਗਾ, ਇਸ ਸਥਿਤੀ ਵਿੱਚ, PLR ਹੈਡਰ ਉਲਟ ਸਥਿਤੀ ਵਿੱਚ ਹੋਣਾ ਚਾਹੀਦਾ ਹੈ, ਭਾਵ ਜੇ ਇਹ ਨਹੀਂ ਹੈ ਤਾਂ ਜੰਪਰ ਨੂੰ ਪਾਇਆ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ ਜਾਂ ਜੇ ਇਹ ਪਾਇਆ ਗਿਆ ਹੈ ਤਾਂ ਬਾਹਰ ਕੱਢਿਆ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ।
ਆਮ ਐਪਲੀਕੇਸ਼ਨ
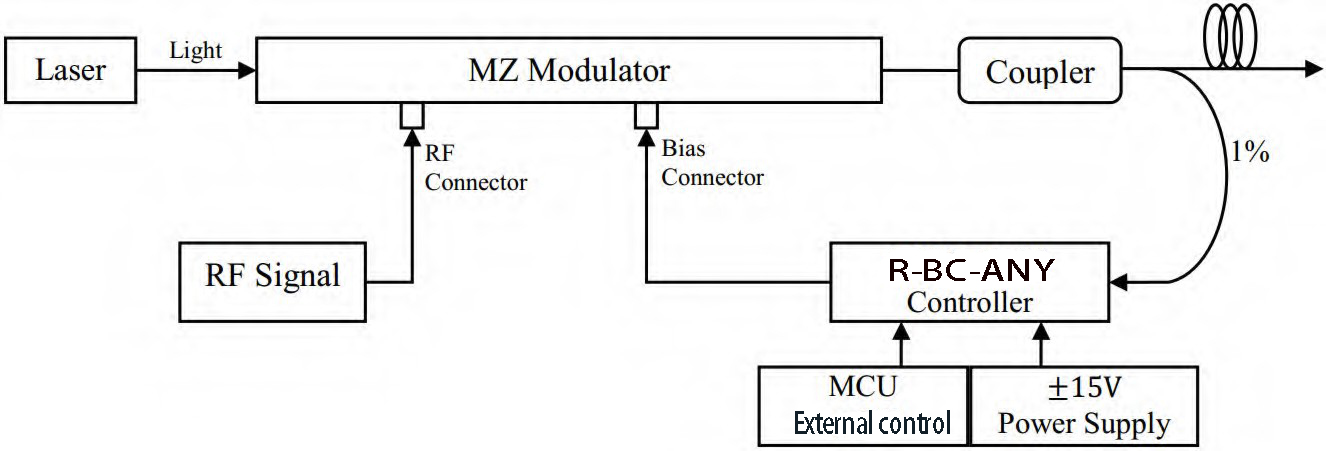
ਕੰਟਰੋਲਰ ਵਰਤਣ ਵਿੱਚ ਆਸਾਨ ਹੈ।
ਕਦਮ 1. ਕਪਲਰ ਦੇ 1% ਪੋਰਟ ਨੂੰ ਕੰਟਰੋਲਰ ਦੇ ਫੋਟੋਡੀਓਡ ਨਾਲ ਜੋੜੋ।
ਕਦਮ 2. ਕੰਟਰੋਲਰ ਦੇ ਬਾਈਸ ਵੋਲਟੇਜ ਆਉਟਪੁੱਟ (SMA ਜਾਂ 2.54mm 2-ਪਿੰਨ ਹੈਡਰ ਰਾਹੀਂ) ਨੂੰ ਮੋਡਿਊਲੇਟਰ ਦੇ ਬਾਈਸ ਪੋਰਟ ਨਾਲ ਕਨੈਕਟ ਕਰੋ।
ਕਦਮ 3. +15V ਅਤੇ -15V DC ਵੋਲਟੇਜ ਵਾਲਾ ਕੰਟਰੋਲਰ ਪ੍ਰਦਾਨ ਕਰੋ।
ਕਦਮ 4. ਕੰਟਰੋਲਰ ਨੂੰ ਰੀਸੈਟ ਕਰੋ ਅਤੇ ਇਹ ਕੰਮ ਕਰਨਾ ਸ਼ੁਰੂ ਕਰ ਦੇਵੇਗਾ।
ਨੋਟ: ਕੰਟਰੋਲਰ ਨੂੰ ਰੀਸੈਟ ਕਰਨ ਤੋਂ ਪਹਿਲਾਂ ਕਿਰਪਾ ਕਰਕੇ ਇਹ ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਪੂਰੇ ਸਿਸਟਮ ਦਾ RF ਸਿਗਨਲ ਚਾਲੂ ਹੈ।
ਰੋਫੀਆ ਓਪਟੋਇਲੈਕਟ੍ਰੋਨਿਕਸ ਵਪਾਰਕ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮਾਡਿਊਲੇਟਰਾਂ, ਫੇਜ਼ ਮਾਡਿਊਲੇਟਰਾਂ, ਇੰਟੈਂਸਿਟੀ ਮਾਡਿਊਲੇਟਰ, ਫੋਟੋਡਿਟੈਕਟਰ, ਲੇਜ਼ਰ ਲਾਈਟ ਸੋਰਸ, ਡੀਐਫਬੀ ਲੇਜ਼ਰ, ਆਪਟੀਕਲ ਐਂਪਲੀਫਾਇਰ, ਈਡੀਐਫਏ, ਐਸਐਲਡੀ ਲੇਜ਼ਰ, ਕਿਊਪੀਐਸਕੇ ਮਾਡਿਊਲੇਸ਼ਨ, ਪਲਸ ਲੇਜ਼ਰ, ਲਾਈਟ ਡਿਟੈਕਟਰ, ਬੈਲੇਂਸਡ ਫੋਟੋਡਿਟੈਕਟਰ, ਲੇਜ਼ਰ ਡਰਾਈਵਰ, ਫਾਈਬਰ ਆਪਟਿਕ ਐਂਪਲੀਫਾਇਰ, ਆਪਟੀਕਲ ਪਾਵਰ ਮੀਟਰ, ਬ੍ਰੌਡਬੈਂਡ ਲੇਜ਼ਰ, ਟਿਊਨੇਬਲ ਲੇਜ਼ਰ, ਆਪਟੀਕਲ ਡਿਟੈਕਟਰ, ਲੇਜ਼ਰ ਡਾਇਓਡ ਡਰਾਈਵਰ, ਫਾਈਬਰ ਐਂਪਲੀਫਾਇਰ ਦੀ ਇੱਕ ਉਤਪਾਦ ਲਾਈਨ ਪੇਸ਼ ਕਰਦਾ ਹੈ। ਅਸੀਂ ਕਸਟਮਾਈਜ਼ੇਸ਼ਨ ਲਈ ਬਹੁਤ ਸਾਰੇ ਖਾਸ ਮਾਡਿਊਲੇਟਰ ਵੀ ਪ੍ਰਦਾਨ ਕਰਦੇ ਹਾਂ, ਜਿਵੇਂ ਕਿ 1*4 ਐਰੇ ਫੇਜ਼ ਮਾਡਿਊਲੇਟਰਾਂ, ਅਲਟਰਾ-ਲੋਅ ਵੀਪੀਆਈ, ਅਤੇ ਅਲਟਰਾ-ਹਾਈ ਐਕਸਟੈਂਸ਼ਨ ਰੇਸ਼ੋ ਮਾਡਿਊਲੇਟਰਾਂ, ਜੋ ਮੁੱਖ ਤੌਰ 'ਤੇ ਯੂਨੀਵਰਸਿਟੀਆਂ ਅਤੇ ਸੰਸਥਾਵਾਂ ਵਿੱਚ ਵਰਤੇ ਜਾਂਦੇ ਹਨ।
ਉਮੀਦ ਹੈ ਕਿ ਸਾਡੇ ਉਤਪਾਦ ਤੁਹਾਡੇ ਅਤੇ ਤੁਹਾਡੀ ਖੋਜ ਲਈ ਮਦਦਗਾਰ ਹੋਣਗੇ।


