




ਲੋਕਾਂ ਦੀ ਜਾਣਕਾਰੀ ਦੀ ਵਧਦੀ ਮੰਗ ਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ, ਆਪਟੀਕਲ ਫਾਈਬਰ ਸੰਚਾਰ ਪ੍ਰਣਾਲੀਆਂ ਦੀ ਪ੍ਰਸਾਰਣ ਦਰ ਦਿਨੋ-ਦਿਨ ਵੱਧ ਰਹੀ ਹੈ। ਭਵਿੱਖ ਦਾ ਆਪਟੀਕਲ ਸੰਚਾਰ ਨੈੱਟਵਰਕ ਅਤਿ-ਉੱਚ ਗਤੀ, ਅਤਿ-ਵੱਡੀ ਸਮਰੱਥਾ, ਅਤਿ-ਲੰਬੀ ਦੂਰੀ, ਅਤੇ ਅਤਿ-ਉੱਚ ਸਪੈਕਟ੍ਰਮ ਕੁਸ਼ਲਤਾ ਵਾਲੇ ਇੱਕ ਆਪਟੀਕਲ ਫਾਈਬਰ ਸੰਚਾਰ ਨੈੱਟਵਰਕ ਵੱਲ ਵਿਕਸਤ ਹੋਵੇਗਾ। ਇੱਕ ਟ੍ਰਾਂਸਮੀਟਰ ਮਹੱਤਵਪੂਰਨ ਹੈ। ਹਾਈ-ਸਪੀਡ ਆਪਟੀਕਲ ਸਿਗਨਲ ਟ੍ਰਾਂਸਮੀਟਰ ਮੁੱਖ ਤੌਰ 'ਤੇ ਇੱਕ ਲੇਜ਼ਰ ਤੋਂ ਬਣਿਆ ਹੁੰਦਾ ਹੈ ਜੋ ਇੱਕ ਆਪਟੀਕਲ ਕੈਰੀਅਰ, ਇੱਕ ਮਾਡਿਊਲੇਟਿੰਗ ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਗਨਲ ਪੈਦਾ ਕਰਨ ਵਾਲਾ ਯੰਤਰ, ਅਤੇ ਇੱਕ ਹਾਈ-ਸਪੀਡ ਇਲੈਕਟ੍ਰੋ-ਆਪਟੀਕਲ ਮੋਡਿਊਲੇਟਰ ਜੋ ਆਪਟੀਕਲ ਕੈਰੀਅਰ ਨੂੰ ਮੋਡਿਊਲੇਟ ਕਰਦਾ ਹੈ। ਹੋਰ ਕਿਸਮਾਂ ਦੇ ਬਾਹਰੀ ਮਾਡਿਊਲੇਟਰਾਂ ਦੇ ਮੁਕਾਬਲੇ, ਲਿਥੀਅਮ ਨਿਓਬੇਟ ਇਲੈਕਟ੍ਰੋ-ਆਪਟੀਕਲ ਮਾਡਿਊਲੇਟਰਾਂ ਵਿੱਚ ਵਿਆਪਕ ਓਪਰੇਟਿੰਗ ਫ੍ਰੀਕੁਐਂਸੀ, ਚੰਗੀ ਸਥਿਰਤਾ, ਉੱਚ ਵਿਨਾਸ਼ ਅਨੁਪਾਤ, ਸਥਿਰ ਕਾਰਜਸ਼ੀਲ ਪ੍ਰਦਰਸ਼ਨ, ਉੱਚ ਮਾਡਿਊਲੇਸ਼ਨ ਦਰ, ਛੋਟੀ ਚੀਰ, ਆਸਾਨ ਜੋੜੀ, ਪਰਿਪੱਕ ਉਤਪਾਦਨ ਤਕਨਾਲੋਜੀ, ਆਦਿ ਦੇ ਫਾਇਦੇ ਹਨ। ਇਹ ਉੱਚ-ਗਤੀ, ਵੱਡੀ-ਸਮਰੱਥਾ, ਅਤੇ ਲੰਬੀ-ਦੂਰੀ ਦੇ ਆਪਟੀਕਲ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਪ੍ਰਣਾਲੀਆਂ ਵਿੱਚ ਵਿਆਪਕ ਤੌਰ 'ਤੇ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ।
ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮਾਡਿਊਲੇਟਰ ਦਾ ਇੱਕ ਬਹੁਤ ਹੀ ਮਹੱਤਵਪੂਰਨ ਭੌਤਿਕ ਮਾਪਦੰਡ ਹੈ। ਇਹ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮਾਡਿਊਲੇਟਰ ਦੀ ਆਉਟਪੁੱਟ ਲਾਈਟ ਤੀਬਰਤਾ ਦੇ ਅਨੁਸਾਰੀ ਬਾਈਸ ਵੋਲਟੇਜ ਵਿੱਚ ਘੱਟੋ-ਘੱਟ ਤੋਂ ਵੱਧ ਤੋਂ ਵੱਧ ਤੱਕ ਤਬਦੀਲੀ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ। ਇਹ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮਾਡਿਊਲੇਟਰ ਨੂੰ ਵੱਡੀ ਹੱਦ ਤੱਕ ਨਿਰਧਾਰਤ ਕਰਦਾ ਹੈ। ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮਾਡਿਊਲੇਟਰ ਦੇ ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ ਨੂੰ ਸਹੀ ਅਤੇ ਤੇਜ਼ੀ ਨਾਲ ਕਿਵੇਂ ਮਾਪਣਾ ਹੈ, ਡਿਵਾਈਸ ਦੇ ਪ੍ਰਦਰਸ਼ਨ ਨੂੰ ਅਨੁਕੂਲ ਬਣਾਉਣ ਅਤੇ ਡਿਵਾਈਸ ਦੀ ਕੁਸ਼ਲਤਾ ਨੂੰ ਬਿਹਤਰ ਬਣਾਉਣ ਲਈ ਬਹੁਤ ਮਹੱਤਵ ਰੱਖਦਾ ਹੈ। ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮਾਡਿਊਲੇਟਰ ਦੇ ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ ਵਿੱਚ DC (ਅੱਧਾ-ਵੇਵ) ਸ਼ਾਮਲ ਹੈ।

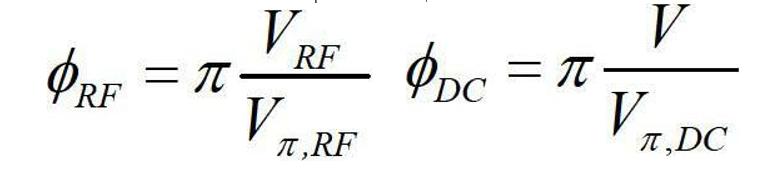
ਵੋਲਟੇਜ ਅਤੇ ਰੇਡੀਓਫ੍ਰੀਕੁਐਂਸੀ) ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ। ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਟਰ ਦਾ ਟ੍ਰਾਂਸਫਰ ਫੰਕਸ਼ਨ ਇਸ ਪ੍ਰਕਾਰ ਹੈ:
ਇਹਨਾਂ ਵਿੱਚੋਂ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡਿਊਲੇਟਰ ਦੀ ਆਉਟਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਹੈ;
ਕੀ ਮੋਡੂਲੇਟਰ ਦੀ ਇਨਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਹੈ;
ਕੀ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡਿਊਲੇਟਰ ਦਾ ਸੰਮਿਲਨ ਨੁਕਸਾਨ ਹੈ;
ਹਾਫ-ਵੇਵ ਵੋਲਟੇਜ ਨੂੰ ਮਾਪਣ ਲਈ ਮੌਜੂਦਾ ਤਰੀਕਿਆਂ ਵਿੱਚ ਐਕਸਟ੍ਰੀਮ ਵੈਲਯੂ ਜਨਰੇਸ਼ਨ ਅਤੇ ਫ੍ਰੀਕੁਐਂਸੀ ਡਬਲਿੰਗ ਵਿਧੀਆਂ ਸ਼ਾਮਲ ਹਨ, ਜੋ ਕ੍ਰਮਵਾਰ ਮੋਡੂਲੇਟਰ ਦੇ ਡਾਇਰੈਕਟ ਕਰੰਟ (DC) ਹਾਫ-ਵੇਵ ਵੋਲਟੇਜ ਅਤੇ ਰੇਡੀਓ ਫ੍ਰੀਕੁਐਂਸੀ (RF) ਹਾਫ-ਵੇਵ ਵੋਲਟੇਜ ਨੂੰ ਮਾਪ ਸਕਦੀਆਂ ਹਨ।
ਸਾਰਣੀ 1 ਦੋ ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ ਟੈਸਟ ਵਿਧੀਆਂ ਦੀ ਤੁਲਨਾ
| ਐਕਸਟ੍ਰੀਮ ਵੈਲਯੂ ਵਿਧੀ | ਬਾਰੰਬਾਰਤਾ ਦੁੱਗਣੀ ਕਰਨ ਦਾ ਤਰੀਕਾ | |
| ਪ੍ਰਯੋਗਸ਼ਾਲਾ ਉਪਕਰਣ | ਲੇਜ਼ਰ ਪਾਵਰ ਸਪਲਾਈ ਟੈਸਟ ਅਧੀਨ ਤੀਬਰਤਾ ਮੋਡਿਊਲੇਟਰ ਐਡਜਸਟੇਬਲ ਡੀਸੀ ਪਾਵਰ ਸਪਲਾਈ ±15V ਆਪਟੀਕਲ ਪਾਵਰ ਮੀਟਰ | ਲੇਜ਼ਰ ਰੋਸ਼ਨੀ ਸਰੋਤ ਟੈਸਟ ਅਧੀਨ ਤੀਬਰਤਾ ਮੋਡਿਊਲੇਟਰ ਐਡਜਸਟੇਬਲ ਡੀਸੀ ਪਾਵਰ ਸਪਲਾਈ ਔਸਿਲੋਸਕੋਪ ਸਿਗਨਲ ਸਰੋਤ (ਡੀਸੀ ਪੱਖਪਾਤ) |
| ਟੈਸਟਿੰਗ ਸਮਾਂ | 20 ਮਿੰਟ () | 5 ਮਿੰਟ |
| ਪ੍ਰਯੋਗਾਤਮਕ ਫਾਇਦੇ | ਪੂਰਾ ਕਰਨਾ ਆਸਾਨ | ਮੁਕਾਬਲਤਨ ਸਹੀ ਟੈਸਟ ਇੱਕੋ ਸਮੇਂ DC ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ ਅਤੇ RF ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ ਪ੍ਰਾਪਤ ਕਰ ਸਕਦਾ ਹੈ |
| ਪ੍ਰਯੋਗਾਤਮਕ ਨੁਕਸਾਨ | ਲੰਬੇ ਸਮੇਂ ਅਤੇ ਹੋਰ ਕਾਰਕਾਂ ਕਰਕੇ, ਟੈਸਟ ਸਹੀ ਨਹੀਂ ਹੈ ਸਿੱਧਾ ਯਾਤਰੀ ਟੈਸਟ ਡੀਸੀ ਹਾਫ-ਵੇਵ ਵੋਲਟੇਜ | ਮੁਕਾਬਲਤਨ ਲੰਮਾ ਸਮਾਂ ਵੱਡੇ ਵੇਵਫਾਰਮ ਡਿਸਟੋਰਸ਼ਨ ਨਿਰਣੇ ਦੀ ਗਲਤੀ, ਆਦਿ ਵਰਗੇ ਕਾਰਕ, ਟੈਸਟ ਸਹੀ ਨਹੀਂ ਹੈ। |
ਇਹ ਇਸ ਤਰ੍ਹਾਂ ਕੰਮ ਕਰਦਾ ਹੈ:
(1) ਅਤਿਅੰਤ ਮੁੱਲ ਵਿਧੀ
ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਟਰ ਦੇ ਡੀਸੀ ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ ਨੂੰ ਮਾਪਣ ਲਈ ਐਕਸਟ੍ਰੀਮ ਵੈਲਯੂ ਵਿਧੀ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਪਹਿਲਾਂ, ਮੋਡੂਲੇਸ਼ਨ ਸਿਗਨਲ ਤੋਂ ਬਿਨਾਂ, ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਟਰ ਦੇ ਟ੍ਰਾਂਸਫਰ ਫੰਕਸ਼ਨ ਕਰਵ ਨੂੰ ਡੀਸੀ ਬਾਈਸ ਵੋਲਟੇਜ ਅਤੇ ਆਉਟਪੁੱਟ ਲਾਈਟ ਤੀਬਰਤਾ ਤਬਦੀਲੀ ਨੂੰ ਮਾਪ ਕੇ ਪ੍ਰਾਪਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਟ੍ਰਾਂਸਫਰ ਫੰਕਸ਼ਨ ਕਰਵ ਤੋਂ ਵੱਧ ਤੋਂ ਵੱਧ ਮੁੱਲ ਬਿੰਦੂ ਅਤੇ ਘੱਟੋ ਘੱਟ ਮੁੱਲ ਬਿੰਦੂ ਨਿਰਧਾਰਤ ਕਰੋ, ਅਤੇ ਸੰਬੰਧਿਤ ਡੀਸੀ ਵੋਲਟੇਜ ਮੁੱਲ ਕ੍ਰਮਵਾਰ Vmax ਅਤੇ Vmin ਪ੍ਰਾਪਤ ਕਰੋ। ਅੰਤ ਵਿੱਚ, ਇਹਨਾਂ ਦੋ ਵੋਲਟੇਜ ਮੁੱਲਾਂ ਵਿੱਚ ਅੰਤਰ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਟਰ ਦਾ ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ Vπ=Vmax-Vmin ਹੈ।
(2) ਬਾਰੰਬਾਰਤਾ ਦੁੱਗਣੀ ਕਰਨ ਦਾ ਤਰੀਕਾ
ਇਹ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਟਰ ਦੇ RF ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ ਨੂੰ ਮਾਪਣ ਲਈ ਫ੍ਰੀਕੁਐਂਸੀ ਡਬਲਿੰਗ ਵਿਧੀ ਦੀ ਵਰਤੋਂ ਕਰ ਰਿਹਾ ਸੀ। ਜਦੋਂ ਆਉਟਪੁੱਟ ਲਾਈਟ ਤੀਬਰਤਾ ਨੂੰ ਵੱਧ ਤੋਂ ਵੱਧ ਜਾਂ ਘੱਟੋ-ਘੱਟ ਮੁੱਲ ਵਿੱਚ ਬਦਲਿਆ ਜਾਂਦਾ ਹੈ ਤਾਂ DC ਵੋਲਟੇਜ ਨੂੰ ਅਨੁਕੂਲ ਕਰਨ ਲਈ ਇੱਕੋ ਸਮੇਂ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਟਰ ਵਿੱਚ DC ਬਾਈਸ ਕੰਪਿਊਟਰ ਅਤੇ AC ਮੋਡੂਲੇਸ਼ਨ ਸਿਗਨਲ ਸ਼ਾਮਲ ਕਰੋ। ਉਸੇ ਸਮੇਂ, ਅਤੇ ਇਹ ਦੋਹਰਾ-ਟਰੇਸ ਔਸਿਲੋਸਕੋਪ 'ਤੇ ਦੇਖਿਆ ਜਾ ਸਕਦਾ ਹੈ ਕਿ ਆਉਟਪੁੱਟ ਮੋਡੂਲੇਟਡ ਸਿਗਨਲ ਫ੍ਰੀਕੁਐਂਸੀ ਡਬਲਿੰਗ ਡਿਸਟੌਰਸ਼ਨ ਦਿਖਾਈ ਦੇਵੇਗਾ। ਦੋ ਨਾਲ ਲੱਗਦੇ ਫ੍ਰੀਕੁਐਂਸੀ ਡਬਲਿੰਗ ਡਿਸਟੌਰਸ਼ਨ ਦੇ ਅਨੁਸਾਰੀ DC ਵੋਲਟੇਜ ਦਾ ਇੱਕੋ ਇੱਕ ਅੰਤਰ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਟਰ ਦਾ RF ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ ਹੈ।
ਸੰਖੇਪ: ਐਕਸਟ੍ਰੀਮ ਵੈਲਯੂ ਵਿਧੀ ਅਤੇ ਫ੍ਰੀਕੁਐਂਸੀ ਡਬਲਿੰਗ ਵਿਧੀ ਦੋਵੇਂ ਸਿਧਾਂਤਕ ਤੌਰ 'ਤੇ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡਿਊਲੇਟਰ ਦੇ ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ ਨੂੰ ਮਾਪ ਸਕਦੇ ਹਨ, ਪਰ ਤੁਲਨਾ ਲਈ, ਸ਼ਕਤੀਸ਼ਾਲੀ ਮੁੱਲ ਵਿਧੀ ਨੂੰ ਲੰਬੇ ਮਾਪ ਸਮੇਂ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ, ਅਤੇ ਲੰਬਾ ਮਾਪ ਸਮਾਂ ਲੇਜ਼ਰ ਦੀ ਆਉਟਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਦੇ ਉਤਰਾਅ-ਚੜ੍ਹਾਅ ਦੇ ਕਾਰਨ ਹੋਵੇਗਾ ਅਤੇ ਮਾਪ ਗਲਤੀਆਂ ਦਾ ਕਾਰਨ ਬਣਦਾ ਹੈ। ਐਕਸਟ੍ਰੀਮ ਵੈਲਯੂ ਵਿਧੀ ਨੂੰ ਇੱਕ ਛੋਟੇ ਸਟੈਪ ਵੈਲਯੂ ਨਾਲ DC ਬਾਈਸ ਨੂੰ ਸਕੈਨ ਕਰਨ ਅਤੇ ਮੋਡਿਊਲੇਟਰ ਦੀ ਆਉਟਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਨੂੰ ਉਸੇ ਸਮੇਂ ਰਿਕਾਰਡ ਕਰਨ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ ਤਾਂ ਜੋ ਇੱਕ ਵਧੇਰੇ ਸਹੀ DC ਹਾਫ-ਵੇਵ ਵੋਲਟੇਜ ਮੁੱਲ ਪ੍ਰਾਪਤ ਕੀਤਾ ਜਾ ਸਕੇ।
ਫ੍ਰੀਕੁਐਂਸੀ ਡਬਲਿੰਗ ਵਿਧੀ ਫ੍ਰੀਕੁਐਂਸੀ ਡਬਲਿੰਗ ਵੇਵਫਾਰਮ ਨੂੰ ਦੇਖ ਕੇ ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ ਨੂੰ ਨਿਰਧਾਰਤ ਕਰਨ ਦਾ ਇੱਕ ਤਰੀਕਾ ਹੈ। ਜਦੋਂ ਲਾਗੂ ਕੀਤਾ ਗਿਆ ਬਾਈਸ ਵੋਲਟੇਜ ਇੱਕ ਖਾਸ ਮੁੱਲ 'ਤੇ ਪਹੁੰਚਦਾ ਹੈ, ਤਾਂ ਫ੍ਰੀਕੁਐਂਸੀ ਗੁਣਾ ਵਿਗਾੜ ਹੁੰਦਾ ਹੈ, ਅਤੇ ਵੇਵਫਾਰਮ ਵਿਗਾੜ ਬਹੁਤ ਜ਼ਿਆਦਾ ਧਿਆਨ ਦੇਣ ਯੋਗ ਨਹੀਂ ਹੁੰਦਾ। ਇਸਨੂੰ ਨੰਗੀ ਅੱਖ ਨਾਲ ਦੇਖਣਾ ਆਸਾਨ ਨਹੀਂ ਹੈ। ਇਸ ਤਰ੍ਹਾਂ, ਇਹ ਲਾਜ਼ਮੀ ਤੌਰ 'ਤੇ ਵਧੇਰੇ ਮਹੱਤਵਪੂਰਨ ਗਲਤੀਆਂ ਦਾ ਕਾਰਨ ਬਣੇਗਾ, ਅਤੇ ਇਹ ਜੋ ਮਾਪਦਾ ਹੈ ਉਹ ਹੈ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਟਰ ਦਾ RF ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ।