




ਪਹਿਲਾਂ, ਅੰਦਰੂਨੀ ਮੋਡੂਲੇਸ਼ਨ ਅਤੇ ਬਾਹਰੀ ਮੋਡੂਲੇਸ਼ਨ
ਮੋਡਿਊਲੇਟਰ ਅਤੇ ਲੇਜ਼ਰ ਵਿਚਕਾਰ ਸਾਪੇਖਿਕ ਸਬੰਧ ਦੇ ਅਨੁਸਾਰ,ਲੇਜ਼ਰ ਮੋਡੂਲੇਸ਼ਨਅੰਦਰੂਨੀ ਮੋਡੂਲੇਸ਼ਨ ਅਤੇ ਬਾਹਰੀ ਮੋਡੂਲੇਸ਼ਨ ਵਿੱਚ ਵੰਡਿਆ ਜਾ ਸਕਦਾ ਹੈ।
01 ਅੰਦਰੂਨੀ ਮੋਡੂਲੇਸ਼ਨ
ਮਾਡਿਊਲੇਸ਼ਨ ਸਿਗਨਲ ਲੇਜ਼ਰ ਓਸੀਲੇਸ਼ਨ ਦੀ ਪ੍ਰਕਿਰਿਆ ਵਿੱਚ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਯਾਨੀ ਕਿ, ਲੇਜ਼ਰ ਓਸੀਲੇਸ਼ਨ ਦੇ ਮਾਪਦੰਡ ਮਾਡਿਊਲੇਸ਼ਨ ਸਿਗਨਲ ਦੇ ਨਿਯਮ ਅਨੁਸਾਰ ਬਦਲੇ ਜਾਂਦੇ ਹਨ, ਤਾਂ ਜੋ ਲੇਜ਼ਰ ਆਉਟਪੁੱਟ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਨੂੰ ਬਦਲਿਆ ਜਾ ਸਕੇ ਅਤੇ ਮਾਡਿਊਲੇਸ਼ਨ ਪ੍ਰਾਪਤ ਕੀਤਾ ਜਾ ਸਕੇ।
(1) ਆਉਟਪੁੱਟ ਲੇਜ਼ਰ ਤੀਬਰਤਾ ਦੇ ਮੋਡੂਲੇਸ਼ਨ ਨੂੰ ਪ੍ਰਾਪਤ ਕਰਨ ਲਈ ਲੇਜ਼ਰ ਪੰਪ ਸਰੋਤ ਨੂੰ ਸਿੱਧਾ ਕੰਟਰੋਲ ਕਰੋ ਅਤੇ ਕੀ ਹੈ, ਤਾਂ ਜੋ ਇਸਨੂੰ ਪਾਵਰ ਸਪਲਾਈ ਦੁਆਰਾ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾ ਸਕੇ।
(2) ਮੋਡੂਲੇਸ਼ਨ ਐਲੀਮੈਂਟ ਨੂੰ ਰੈਜ਼ੋਨੇਟਰ ਵਿੱਚ ਰੱਖਿਆ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਮੋਡੂਲੇਸ਼ਨ ਐਲੀਮੈਂਟ ਦੀਆਂ ਭੌਤਿਕ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਵਿੱਚ ਤਬਦੀਲੀ ਨੂੰ ਰੈਜ਼ੋਨੇਟਰ ਦੇ ਮਾਪਦੰਡਾਂ ਨੂੰ ਬਦਲਣ ਲਈ ਸਿਗਨਲ ਦੁਆਰਾ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਇਸ ਤਰ੍ਹਾਂ ਲੇਜ਼ਰ ਦੀਆਂ ਆਉਟਪੁੱਟ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਨੂੰ ਬਦਲਿਆ ਜਾਂਦਾ ਹੈ।
02 ਬਾਹਰੀ ਮੋਡੂਲੇਸ਼ਨ
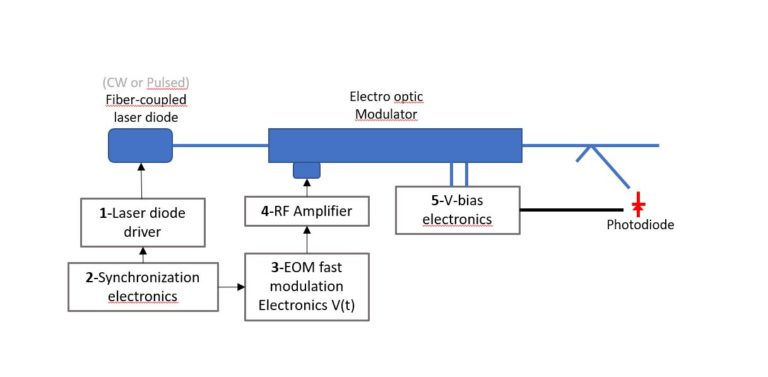
ਬਾਹਰੀ ਮੋਡੂਲੇਸ਼ਨ ਲੇਜ਼ਰ ਜਨਰੇਸ਼ਨ ਅਤੇ ਮੋਡੂਲੇਸ਼ਨ ਦਾ ਵੱਖਰਾ ਹੋਣਾ ਹੈ। ਲੇਜ਼ਰ ਦੇ ਗਠਨ ਤੋਂ ਬਾਅਦ ਮੋਡੂਲੇਟਡ ਸਿਗਨਲ ਦੇ ਲੋਡਿੰਗ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ, ਯਾਨੀ ਕਿ, ਮੋਡੂਲੇਟਰ ਨੂੰ ਲੇਜ਼ਰ ਰੈਜ਼ੋਨੇਟਰ ਦੇ ਬਾਹਰ ਆਪਟੀਕਲ ਮਾਰਗ ਵਿੱਚ ਰੱਖਿਆ ਜਾਂਦਾ ਹੈ।
ਮਾਡਿਊਲੇਟਰ ਪੜਾਅ ਦੀਆਂ ਕੁਝ ਭੌਤਿਕ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਨੂੰ ਬਦਲਣ ਲਈ ਮਾਡਿਊਲੇਟਰ ਵਿੱਚ ਮਾਡਿਊਲੇਟਰ ਸਿਗਨਲ ਵੋਲਟੇਜ ਜੋੜਿਆ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਜਦੋਂ ਲੇਜ਼ਰ ਇਸ ਵਿੱਚੋਂ ਲੰਘਦਾ ਹੈ, ਤਾਂ ਪ੍ਰਕਾਸ਼ ਤਰੰਗ ਦੇ ਕੁਝ ਮਾਪਦੰਡ ਮਾਡਿਊਲੇਟ ਕੀਤੇ ਜਾਂਦੇ ਹਨ, ਇਸ ਤਰ੍ਹਾਂ ਸੰਚਾਰਿਤ ਕੀਤੀ ਜਾਣ ਵਾਲੀ ਜਾਣਕਾਰੀ ਨੂੰ ਲੈ ਕੇ ਜਾਂਦੇ ਹਨ। ਇਸ ਲਈ, ਬਾਹਰੀ ਮਾਡਿਊਲੇਟਰ ਲੇਜ਼ਰ ਪੈਰਾਮੀਟਰਾਂ ਨੂੰ ਬਦਲਣ ਲਈ ਨਹੀਂ ਹੈ, ਸਗੋਂ ਆਉਟਪੁੱਟ ਲੇਜ਼ਰ ਦੇ ਪੈਰਾਮੀਟਰਾਂ ਨੂੰ ਬਦਲਣ ਲਈ ਹੈ, ਜਿਵੇਂ ਕਿ ਤੀਬਰਤਾ, ਬਾਰੰਬਾਰਤਾ, ਅਤੇ ਹੋਰ।
ਦੂਜਾ,ਲੇਜ਼ਰ ਮੋਡੂਲੇਟਰਵਰਗੀਕਰਨ
ਮੋਡਿਊਲੇਟਰ ਦੇ ਕੰਮ ਕਰਨ ਦੇ ਢੰਗ ਅਨੁਸਾਰ, ਇਸਨੂੰ ਇਹਨਾਂ ਵਿੱਚ ਸ਼੍ਰੇਣੀਬੱਧ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਸ਼ਨ, ਐਕੋਸਟੂਪਟਿਕ ਮੋਡੂਲੇਸ਼ਨ, ਮੈਗਨੇਟੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਸ਼ਨ ਅਤੇ ਡਾਇਰੈਕਟ ਮੋਡੂਲੇਸ਼ਨ।
01 ਡਾਇਰੈਕਟ ਮੋਡੂਲੇਸ਼ਨ
ਦਾ ਡਰਾਈਵਿੰਗ ਕਰੰਟਸੈਮੀਕੰਡਕਟਰ ਲੇਜ਼ਰਜਾਂ ਪ੍ਰਕਾਸ਼-ਨਿਸਰਕ ਡਾਇਓਡ ਨੂੰ ਸਿੱਧੇ ਇਲੈਕਟ੍ਰਿਕ ਸਿਗਨਲ ਦੁਆਰਾ ਮੋਡਿਊਲੇਟ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਜੋ ਆਉਟਪੁੱਟ ਲਾਈਟ ਨੂੰ ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਗਨਲ ਦੇ ਬਦਲਾਅ ਨਾਲ ਮੋਡਿਊਲੇਟ ਕੀਤਾ ਜਾ ਸਕੇ।
(1) ਸਿੱਧੇ ਮੋਡਿਊਲੇਸ਼ਨ ਵਿੱਚ TTL ਮੋਡਿਊਲੇਸ਼ਨ
ਲੇਜ਼ਰ ਪਾਵਰ ਸਪਲਾਈ ਵਿੱਚ ਇੱਕ TTL ਡਿਜੀਟਲ ਸਿਗਨਲ ਜੋੜਿਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਜੋ ਲੇਜ਼ਰ ਡਰਾਈਵ ਕਰੰਟ ਨੂੰ ਬਾਹਰੀ ਸਿਗਨਲ ਰਾਹੀਂ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾ ਸਕੇ, ਅਤੇ ਫਿਰ ਲੇਜ਼ਰ ਆਉਟਪੁੱਟ ਬਾਰੰਬਾਰਤਾ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾ ਸਕੇ।
(2) ਸਿੱਧੇ ਮੋਡਿਊਲੇਸ਼ਨ ਵਿੱਚ ਐਨਾਲਾਗ ਮੋਡਿਊਲੇਸ਼ਨ
ਲੇਜ਼ਰ ਪਾਵਰ ਸਪਲਾਈ ਐਨਾਲਾਗ ਸਿਗਨਲ (5V ਤੋਂ ਘੱਟ ਐਂਪਲੀਟਿਊਡ ਆਰਬਿਟਰਰੀ ਚੇਂਜ ਸਿਗਨਲ ਵੇਵ) ਤੋਂ ਇਲਾਵਾ, ਬਾਹਰੀ ਸਿਗਨਲ ਇਨਪੁਟ ਨੂੰ ਲੇਜ਼ਰ ਦੇ ਵੱਖਰੇ ਡਰਾਈਵ ਕਰੰਟ ਦੇ ਅਨੁਸਾਰ ਵੱਖ-ਵੱਖ ਵੋਲਟੇਜ ਬਣਾ ਸਕਦਾ ਹੈ, ਅਤੇ ਫਿਰ ਆਉਟਪੁੱਟ ਲੇਜ਼ਰ ਪਾਵਰ ਨੂੰ ਕੰਟਰੋਲ ਕਰ ਸਕਦਾ ਹੈ।
02 ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਸ਼ਨ
ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਪ੍ਰਭਾਵ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਕੀਤੇ ਜਾਣ ਵਾਲੇ ਮਾਡੂਲੇਸ਼ਨ ਨੂੰ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮਾਡੂਲੇਸ਼ਨ ਕਿਹਾ ਜਾਂਦਾ ਹੈ। ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮਾਡੂਲੇਸ਼ਨ ਦਾ ਭੌਤਿਕ ਆਧਾਰ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਪ੍ਰਭਾਵ ਹੈ, ਯਾਨੀ ਕਿ, ਇੱਕ ਲਾਗੂ ਇਲੈਕਟ੍ਰਿਕ ਫੀਲਡ ਦੀ ਕਿਰਿਆ ਦੇ ਅਧੀਨ, ਕੁਝ ਕ੍ਰਿਸਟਲਾਂ ਦਾ ਰਿਫ੍ਰੈਕਟਿਵ ਇੰਡੈਕਸ ਬਦਲ ਜਾਵੇਗਾ, ਅਤੇ ਜਦੋਂ ਪ੍ਰਕਾਸ਼ ਤਰੰਗ ਇਸ ਮਾਧਿਅਮ ਵਿੱਚੋਂ ਲੰਘਦੀ ਹੈ, ਤਾਂ ਇਸ ਦੀਆਂ ਪ੍ਰਸਾਰਣ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਪ੍ਰਭਾਵਿਤ ਅਤੇ ਬਦਲ ਜਾਣਗੀਆਂ।
03 ਐਕੋਸਟੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਸ਼ਨ
ਐਕੋਸਟੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਸ਼ਨ ਦਾ ਭੌਤਿਕ ਆਧਾਰ ਐਕੋਸਟੋ-ਆਪਟਿਕ ਪ੍ਰਭਾਵ ਹੈ, ਜੋ ਇਸ ਵਰਤਾਰੇ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ ਕਿ ਪ੍ਰਕਾਸ਼ ਤਰੰਗਾਂ ਮਾਧਿਅਮ ਵਿੱਚ ਪ੍ਰਸਾਰਿਤ ਹੋਣ ਵੇਲੇ ਅਲੌਕਿਕ ਤਰੰਗ ਖੇਤਰ ਦੁਆਰਾ ਫੈਲੀਆਂ ਜਾਂ ਖਿੰਡੀਆਂ ਹੁੰਦੀਆਂ ਹਨ। ਜਦੋਂ ਕਿਸੇ ਮਾਧਿਅਮ ਦਾ ਅਪਵਰਤਕ ਸੂਚਕਾਂਕ ਸਮੇਂ-ਸਮੇਂ 'ਤੇ ਬਦਲਦਾ ਹੈ ਤਾਂ ਇੱਕ ਅਪਵਰਤਕ ਸੂਚਕਾਂਕ ਗਰੇਟਿੰਗ ਬਣਦਾ ਹੈ, ਤਾਂ ਪ੍ਰਕਾਸ਼ ਤਰੰਗ ਮਾਧਿਅਮ ਵਿੱਚ ਫੈਲਣ 'ਤੇ ਵਿਵਰਤਨ ਹੋਵੇਗਾ, ਅਤੇ ਵਿਵਰਤਕ ਪ੍ਰਕਾਸ਼ ਦੀ ਤੀਬਰਤਾ, ਬਾਰੰਬਾਰਤਾ ਅਤੇ ਦਿਸ਼ਾ ਸੁਪਰਜਨਰੇਟਿਡ ਵੇਵ ਫੀਲਡ ਦੇ ਬਦਲਾਅ ਨਾਲ ਬਦਲ ਜਾਵੇਗੀ।
ਐਕੋਸਟੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਸ਼ਨ ਇੱਕ ਭੌਤਿਕ ਪ੍ਰਕਿਰਿਆ ਹੈ ਜੋ ਆਪਟੀਕਲ ਫ੍ਰੀਕੁਐਂਸੀ ਕੈਰੀਅਰ 'ਤੇ ਜਾਣਕਾਰੀ ਲੋਡ ਕਰਨ ਲਈ ਐਕੋਸਟੋ-ਆਪਟਿਕ ਪ੍ਰਭਾਵ ਦੀ ਵਰਤੋਂ ਕਰਦੀ ਹੈ। ਮੋਡੂਲੇਟਿਡ ਸਿਗਨਲ ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਗਨਲ (ਐਂਪਲੀਟਿਊਡ ਮੋਡੂਲੇਸ਼ਨ) ਦੇ ਰੂਪ ਵਿੱਚ ਇਲੈਕਟ੍ਰੋ-ਐਕੋਸਟਿਕ ਟ੍ਰਾਂਸਡਿਊਸਰ 'ਤੇ ਕੰਮ ਕਰਦਾ ਹੈ, ਅਤੇ ਸੰਬੰਧਿਤ ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਗਨਲ ਨੂੰ ਅਲਟਰਾਸੋਨਿਕ ਫੀਲਡ ਵਿੱਚ ਬਦਲ ਦਿੱਤਾ ਜਾਂਦਾ ਹੈ। ਜਦੋਂ ਪ੍ਰਕਾਸ਼ ਤਰੰਗ ਐਕੋਸਟੋ-ਆਪਟਿਕ ਮਾਧਿਅਮ ਵਿੱਚੋਂ ਲੰਘਦੀ ਹੈ, ਤਾਂ ਆਪਟੀਕਲ ਕੈਰੀਅਰ ਮੋਡੂਲੇਟਿਡ ਹੁੰਦਾ ਹੈ ਅਤੇ ਇੱਕ ਤੀਬਰਤਾ ਮੋਡੂਲੇਟਿਡ ਵੇਵ ਬਣ ਜਾਂਦਾ ਹੈ ਜੋ ਜਾਣਕਾਰੀ "ਲੈ ਜਾਂਦੀ ਹੈ"।
04 ਮੈਗਨੇਟੋ-ਆਪਟੀਕਲ ਮੋਡੂਲੇਸ਼ਨ
ਮੈਗਨੇਟੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਸ਼ਨ ਫੈਰਾਡੇ ਦੇ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਆਪਟੀਕਲ ਰੋਟੇਸ਼ਨ ਪ੍ਰਭਾਵ ਦਾ ਇੱਕ ਉਪਯੋਗ ਹੈ। ਜਦੋਂ ਪ੍ਰਕਾਸ਼ ਤਰੰਗਾਂ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਦਿਸ਼ਾ ਦੇ ਸਮਾਨਾਂਤਰ ਮੈਗਨੇਟੋ-ਆਪਟੀਕਲ ਮਾਧਿਅਮ ਰਾਹੀਂ ਫੈਲਦੀਆਂ ਹਨ, ਤਾਂ ਰੇਖਿਕ ਧਰੁਵੀਕ੍ਰਿਤ ਪ੍ਰਕਾਸ਼ ਦੇ ਧਰੁਵੀਕਰਨ ਸਮਤਲ ਦੇ ਘੁੰਮਣ ਦੇ ਵਰਤਾਰੇ ਨੂੰ ਚੁੰਬਕੀ ਘੁੰਮਣ ਕਿਹਾ ਜਾਂਦਾ ਹੈ।
ਚੁੰਬਕੀ ਸੰਤ੍ਰਿਪਤਾ ਪ੍ਰਾਪਤ ਕਰਨ ਲਈ ਮਾਧਿਅਮ 'ਤੇ ਇੱਕ ਸਥਿਰ ਚੁੰਬਕੀ ਖੇਤਰ ਲਗਾਇਆ ਜਾਂਦਾ ਹੈ। ਸਰਕਟ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਦਿਸ਼ਾ ਮਾਧਿਅਮ ਦੀ ਧੁਰੀ ਦਿਸ਼ਾ ਵਿੱਚ ਹੁੰਦੀ ਹੈ, ਅਤੇ ਫੈਰਾਡੇ ਰੋਟੇਸ਼ਨ ਧੁਰੀ ਕਰੰਟ ਚੁੰਬਕੀ ਖੇਤਰ 'ਤੇ ਨਿਰਭਰ ਕਰਦਾ ਹੈ। ਇਸ ਲਈ, ਉੱਚ-ਫ੍ਰੀਕੁਐਂਸੀ ਕੋਇਲ ਦੇ ਕਰੰਟ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਕੇ ਅਤੇ ਧੁਰੀ ਸਿਗਨਲ ਦੀ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਤਾਕਤ ਨੂੰ ਬਦਲ ਕੇ, ਆਪਟੀਕਲ ਵਾਈਬ੍ਰੇਸ਼ਨ ਪਲੇਨ ਦੇ ਰੋਟੇਸ਼ਨ ਐਂਗਲ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ, ਤਾਂ ਜੋ ਪੋਲਰਾਈਜ਼ਰ ਰਾਹੀਂ ਪ੍ਰਕਾਸ਼ ਐਪਲੀਟਿਊਡ θ ਐਂਗਲ ਦੇ ਬਦਲਾਅ ਨਾਲ ਬਦਲ ਜਾਵੇ, ਤਾਂ ਜੋ ਮੋਡੂਲੇਸ਼ਨ ਪ੍ਰਾਪਤ ਕੀਤਾ ਜਾ ਸਕੇ।
ਪੋਸਟ ਸਮਾਂ: ਜਨਵਰੀ-08-2024