




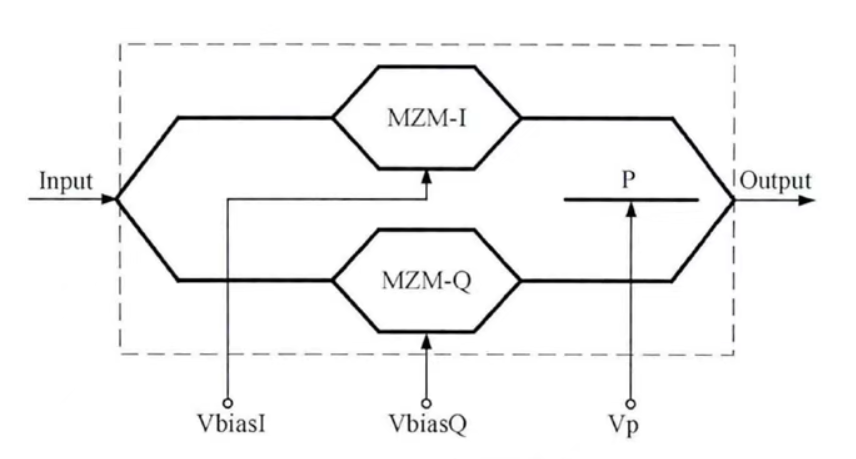
ਦਮਾਚ-ਜ਼ੇਂਡਰ ਮੋਡਿਊਲੇਟਰ(MZ ਮਾਡਿਊਲੇਟਰ) ਦਖਲਅੰਦਾਜ਼ੀ ਸਿਧਾਂਤ ਦੇ ਅਧਾਰ ਤੇ ਆਪਟੀਕਲ ਸਿਗਨਲਾਂ ਨੂੰ ਮੋਡਿਊਲੇਟ ਕਰਨ ਲਈ ਇੱਕ ਮਹੱਤਵਪੂਰਨ ਯੰਤਰ ਹੈ। ਇਸਦਾ ਕਾਰਜਸ਼ੀਲ ਸਿਧਾਂਤ ਇਸ ਪ੍ਰਕਾਰ ਹੈ: ਇਨਪੁਟ ਸਿਰੇ 'ਤੇ Y-ਆਕਾਰ ਵਾਲੀ ਸ਼ਾਖਾ 'ਤੇ, ਇਨਪੁਟ ਲਾਈਟ ਨੂੰ ਦੋ ਪ੍ਰਕਾਸ਼ ਤਰੰਗਾਂ ਵਿੱਚ ਵੰਡਿਆ ਜਾਂਦਾ ਹੈ ਅਤੇ ਕ੍ਰਮਵਾਰ ਪ੍ਰਸਾਰਣ ਲਈ ਦੋ ਸਮਾਨਾਂਤਰ ਆਪਟੀਕਲ ਚੈਨਲਾਂ ਵਿੱਚ ਦਾਖਲ ਹੁੰਦਾ ਹੈ। ਆਪਟੀਕਲ ਚੈਨਲ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਸਮੱਗਰੀ ਤੋਂ ਬਣਿਆ ਹੁੰਦਾ ਹੈ। ਇਸਦੇ ਫੋਟੋਇਲੈਕਟ੍ਰਿਕ ਪ੍ਰਭਾਵ ਦਾ ਫਾਇਦਾ ਉਠਾ ਕੇ, ਜਦੋਂ ਬਾਹਰੀ ਤੌਰ 'ਤੇ ਲਾਗੂ ਕੀਤਾ ਗਿਆ ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਗਨਲ ਬਦਲਦਾ ਹੈ, ਤਾਂ ਇਸਦੀ ਆਪਣੀ ਸਮੱਗਰੀ ਦੇ ਰਿਫ੍ਰੈਕਟਿਵ ਇੰਡੈਕਸ ਨੂੰ ਬਦਲਿਆ ਜਾ ਸਕਦਾ ਹੈ, ਜਿਸਦੇ ਨਤੀਜੇ ਵਜੋਂ ਆਉਟਪੁੱਟ ਸਿਰੇ 'ਤੇ Y-ਆਕਾਰ ਵਾਲੀ ਸ਼ਾਖਾ ਤੱਕ ਪਹੁੰਚਣ ਵਾਲੇ ਪ੍ਰਕਾਸ਼ ਦੇ ਦੋ ਬੀਮਾਂ ਵਿਚਕਾਰ ਵੱਖ-ਵੱਖ ਆਪਟੀਕਲ ਮਾਰਗ ਅੰਤਰ ਹੁੰਦੇ ਹਨ। ਜਦੋਂ ਦੋ ਆਪਟੀਕਲ ਚੈਨਲਾਂ ਵਿੱਚ ਆਪਟੀਕਲ ਸਿਗਨਲ ਆਉਟਪੁੱਟ ਸਿਰੇ 'ਤੇ Y-ਆਕਾਰ ਵਾਲੀ ਸ਼ਾਖਾ ਤੱਕ ਪਹੁੰਚਦੇ ਹਨ, ਤਾਂ ਕਨਵਰਜੈਂਸ ਹੋਵੇਗਾ। ਦੋ ਆਪਟੀਕਲ ਸਿਗਨਲਾਂ ਦੇ ਵੱਖ-ਵੱਖ ਪੜਾਅ ਦੇਰੀ ਦੇ ਕਾਰਨ, ਉਹਨਾਂ ਵਿਚਕਾਰ ਦਖਲਅੰਦਾਜ਼ੀ ਹੁੰਦੀ ਹੈ, ਦੋ ਆਪਟੀਕਲ ਸਿਗਨਲਾਂ ਦੁਆਰਾ ਕੀਤੀ ਗਈ ਪੜਾਅ ਅੰਤਰ ਜਾਣਕਾਰੀ ਨੂੰ ਆਉਟਪੁੱਟ ਸਿਗਨਲ ਦੀ ਤੀਬਰਤਾ ਜਾਣਕਾਰੀ ਵਿੱਚ ਬਦਲਦਾ ਹੈ। ਇਸ ਲਈ, ਆਪਟੀਕਲ ਕੈਰੀਅਰਾਂ 'ਤੇ ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਗਨਲਾਂ ਨੂੰ ਮੋਡਿਊਲੇਟ ਕਰਨ ਦਾ ਕਾਰਜ ਮਾਰਚ-ਜ਼ੇਹੈਂਡਰ ਮਾਡਿਊਲੇਟਰ ਦੇ ਲੋਡਿੰਗ ਵੋਲਟੇਜ ਦੇ ਵੱਖ-ਵੱਖ ਮਾਪਦੰਡਾਂ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਕੇ ਪ੍ਰਾਪਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
ਦੇ ਮੁੱਢਲੇ ਮਾਪਦੰਡMZ ਮੋਡਿਊਲੇਟਰ
MZ ਮੋਡੂਲੇਟਰ ਦੇ ਬੁਨਿਆਦੀ ਮਾਪਦੰਡ ਵੱਖ-ਵੱਖ ਐਪਲੀਕੇਸ਼ਨ ਦ੍ਰਿਸ਼ਾਂ ਵਿੱਚ ਮੋਡੂਲੇਟਰ ਦੇ ਪ੍ਰਦਰਸ਼ਨ ਨੂੰ ਸਿੱਧੇ ਤੌਰ 'ਤੇ ਪ੍ਰਭਾਵਿਤ ਕਰਦੇ ਹਨ। ਇਹਨਾਂ ਵਿੱਚੋਂ, ਮਹੱਤਵਪੂਰਨ ਆਪਟੀਕਲ ਪੈਰਾਮੀਟਰ ਅਤੇ ਇਲੈਕਟ੍ਰੀਕਲ ਪੈਰਾਮੀਟਰ ਹੇਠ ਲਿਖੇ ਅਨੁਸਾਰ ਹਨ।
ਆਪਟੀਕਲ ਪੈਰਾਮੀਟਰ:
(1) ਆਪਟੀਕਲ ਬੈਂਡਵਿਡਥ (3db ਬੈਂਡਵਿਡਥ): ਫ੍ਰੀਕੁਐਂਸੀ ਰੇਂਜ ਜਦੋਂ ਫ੍ਰੀਕੁਐਂਸੀ ਰਿਸਪਾਂਸ ਐਪਲੀਟਿਊਡ ਵੱਧ ਤੋਂ ਵੱਧ ਮੁੱਲ ਤੋਂ 3db ਘੱਟ ਜਾਂਦਾ ਹੈ, ਜਿਸਦੀ ਯੂਨਿਟ Ghz ਹੁੰਦੀ ਹੈ। ਆਪਟੀਕਲ ਬੈਂਡਵਿਡਥ ਸਿਗਨਲ ਦੀ ਫ੍ਰੀਕੁਐਂਸੀ ਰੇਂਜ ਨੂੰ ਦਰਸਾਉਂਦੀ ਹੈ ਜਦੋਂ ਮੋਡਿਊਲੇਟਰ ਆਮ ਤੌਰ 'ਤੇ ਕੰਮ ਕਰ ਰਿਹਾ ਹੁੰਦਾ ਹੈ ਅਤੇ ਇਹ ਆਪਟੀਕਲ ਕੈਰੀਅਰ ਦੀ ਜਾਣਕਾਰੀ ਲੈ ਜਾਣ ਦੀ ਸਮਰੱਥਾ ਨੂੰ ਮਾਪਣ ਲਈ ਇੱਕ ਪੈਰਾਮੀਟਰ ਹੈ।ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡੂਲੇਟਰ.
(2) ਐਕਸਟਿੰਕਸ਼ਨ ਅਨੁਪਾਤ: ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮੋਡਿਊਲੇਟਰ ਦੁਆਰਾ ਵੱਧ ਤੋਂ ਵੱਧ ਆਪਟੀਕਲ ਪਾਵਰ ਆਉਟਪੁੱਟ ਦਾ ਘੱਟੋ-ਘੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਨਾਲ ਅਨੁਪਾਤ, dB ਦੀ ਇਕਾਈ ਦੇ ਨਾਲ। ਐਕਸਟਿੰਕਸ਼ਨ ਅਨੁਪਾਤ ਇੱਕ ਮਾਡਿਊਲੇਟਰ ਦੀ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਸਵਿੱਚ ਸਮਰੱਥਾ ਦਾ ਮੁਲਾਂਕਣ ਕਰਨ ਲਈ ਇੱਕ ਪੈਰਾਮੀਟਰ ਹੈ।
(3) ਵਾਪਸੀ ਦਾ ਨੁਕਸਾਨ: ਇਨਪੁਟ ਸਿਰੇ 'ਤੇ ਪ੍ਰਤੀਬਿੰਬਿਤ ਪ੍ਰਕਾਸ਼ ਸ਼ਕਤੀ ਦਾ ਅਨੁਪਾਤਮੋਡੂਲੇਟਰਇਨਪੁੱਟ ਲਾਈਟ ਪਾਵਰ ਨੂੰ, dB ਦੀ ਇਕਾਈ ਨਾਲ। ਵਾਪਸੀ ਦਾ ਨੁਕਸਾਨ ਇੱਕ ਪੈਰਾਮੀਟਰ ਹੈ ਜੋ ਸਿਗਨਲ ਸਰੋਤ ਤੇ ਵਾਪਸ ਪ੍ਰਤੀਬਿੰਬਿਤ ਘਟਨਾ ਸ਼ਕਤੀ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ।
(4) ਸੰਮਿਲਨ ਨੁਕਸਾਨ: ਇੱਕ ਮਾਡਿਊਲੇਟਰ ਦੀ ਇਨਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਅਤੇ ਇਨਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਦਾ ਅਨੁਪਾਤ ਜਦੋਂ ਇਹ ਆਪਣੀ ਵੱਧ ਤੋਂ ਵੱਧ ਆਉਟਪੁੱਟ ਪਾਵਰ ਤੱਕ ਪਹੁੰਚਦਾ ਹੈ, ਜਿਸ ਵਿੱਚ ਯੂਨਿਟ dB ਹੁੰਦਾ ਹੈ। ਸੰਮਿਲਨ ਨੁਕਸਾਨ ਇੱਕ ਸੂਚਕ ਹੈ ਜੋ ਇੱਕ ਆਪਟੀਕਲ ਮਾਰਗ ਦੇ ਸੰਮਿਲਨ ਕਾਰਨ ਹੋਣ ਵਾਲੇ ਆਪਟੀਕਲ ਪਾਵਰ ਨੁਕਸਾਨ ਨੂੰ ਮਾਪਦਾ ਹੈ।
(5) ਵੱਧ ਤੋਂ ਵੱਧ ਇਨਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ: ਆਮ ਵਰਤੋਂ ਦੌਰਾਨ, ਡਿਵਾਈਸ ਨੂੰ ਨੁਕਸਾਨ ਤੋਂ ਬਚਾਉਣ ਲਈ MZM ਮੋਡਿਊਲੇਟਰ ਇਨਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਇਸ ਮੁੱਲ ਤੋਂ ਘੱਟ ਹੋਣੀ ਚਾਹੀਦੀ ਹੈ, ਜਿਸਦੀ ਯੂਨਿਟ mW ਹੋਣੀ ਚਾਹੀਦੀ ਹੈ।
(6) ਮੋਡੂਲੇਸ਼ਨ ਡੂੰਘਾਈ: ਇਹ ਮੋਡੂਲੇਸ਼ਨ ਸਿਗਨਲ ਐਪਲੀਟਿਊਡ ਅਤੇ ਕੈਰੀਅਰ ਐਪਲੀਟਿਊਡ ਦੇ ਅਨੁਪਾਤ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ, ਜਿਸਨੂੰ ਆਮ ਤੌਰ 'ਤੇ ਪ੍ਰਤੀਸ਼ਤ ਵਜੋਂ ਦਰਸਾਇਆ ਜਾਂਦਾ ਹੈ।
ਬਿਜਲੀ ਦੇ ਮਾਪਦੰਡ:
ਹਾਫ-ਵੇਵ ਵੋਲਟੇਜ: ਇਹ ਮੋਡੂਲੇਟਰ ਨੂੰ ਆਫ ਸਟੇਟ ਤੋਂ ਔਨ ਸਟੇਟ ਵਿੱਚ ਬਦਲਣ ਲਈ ਡਰਾਈਵਿੰਗ ਵੋਲਟੇਜ ਲਈ ਲੋੜੀਂਦੇ ਵੋਲਟੇਜ ਅੰਤਰ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ। MZM ਮੋਡੂਲੇਟਰ ਦੀ ਆਉਟਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਬਾਈਸ ਵੋਲਟੇਜ ਦੇ ਬਦਲਾਅ ਦੇ ਨਾਲ ਲਗਾਤਾਰ ਬਦਲਦੀ ਰਹਿੰਦੀ ਹੈ। ਜਦੋਂ ਮੋਡੂਲੇਟਰ ਆਉਟਪੁੱਟ 180-ਡਿਗਰੀ ਪੜਾਅ ਅੰਤਰ ਪੈਦਾ ਕਰਦਾ ਹੈ, ਤਾਂ ਨਾਲ ਲੱਗਦੇ ਘੱਟੋ-ਘੱਟ ਬਿੰਦੂ ਅਤੇ ਵੱਧ ਤੋਂ ਵੱਧ ਬਿੰਦੂ ਦੇ ਅਨੁਸਾਰ ਬਾਈਸ ਵੋਲਟੇਜ ਵਿੱਚ ਅੰਤਰ ਅੱਧ-ਵੇਵ ਵੋਲਟੇਜ ਹੁੰਦਾ ਹੈ, ਜਿਸਦੀ ਇਕਾਈ V ਹੁੰਦੀ ਹੈ। ਇਹ ਪੈਰਾਮੀਟਰ ਸਮੱਗਰੀ, ਬਣਤਰ ਅਤੇ ਪ੍ਰਕਿਰਿਆ ਵਰਗੇ ਕਾਰਕਾਂ ਦੁਆਰਾ ਨਿਰਧਾਰਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਇਹ ਇੱਕ ਅੰਦਰੂਨੀ ਪੈਰਾਮੀਟਰ ਹੈ।MZM ਮੋਡਿਊਲੇਟਰ.
(2) ਵੱਧ ਤੋਂ ਵੱਧ DC ਬਾਈਸ ਵੋਲਟੇਜ: ਆਮ ਵਰਤੋਂ ਦੌਰਾਨ, ਡਿਵਾਈਸ ਦੇ ਨੁਕਸਾਨ ਨੂੰ ਰੋਕਣ ਲਈ MZM ਦਾ ਇਨਪੁੱਟ ਬਾਈਸ ਵੋਲਟੇਜ ਇਸ ਮੁੱਲ ਤੋਂ ਘੱਟ ਹੋਣਾ ਚਾਹੀਦਾ ਹੈ। ਯੂਨਿਟ V ਹੈ। DC ਬਾਈਸ ਵੋਲਟੇਜ ਦੀ ਵਰਤੋਂ ਵੱਖ-ਵੱਖ ਮੋਡੂਲੇਸ਼ਨ ਜ਼ਰੂਰਤਾਂ ਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ ਮੋਡੂਲੇਟਰ ਦੀ ਬਾਈਸ ਸਥਿਤੀ ਨੂੰ ਕੰਟਰੋਲ ਕਰਨ ਲਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
(3) ਵੱਧ ਤੋਂ ਵੱਧ RF ਸਿਗਨਲ ਮੁੱਲ: ਆਮ ਵਰਤੋਂ ਦੌਰਾਨ, ਡਿਵਾਈਸ ਦੇ ਨੁਕਸਾਨ ਨੂੰ ਰੋਕਣ ਲਈ MZM ਦਾ ਇਨਪੁੱਟ RF ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਗਨਲ ਇਸ ਮੁੱਲ ਤੋਂ ਘੱਟ ਹੋਣਾ ਚਾਹੀਦਾ ਹੈ। ਯੂਨਿਟ V ਹੈ। ਇੱਕ ਰੇਡੀਓ ਫ੍ਰੀਕੁਐਂਸੀ ਸਿਗਨਲ ਇੱਕ ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਗਨਲ ਹੈ ਜਿਸਨੂੰ ਇੱਕ ਆਪਟੀਕਲ ਕੈਰੀਅਰ 'ਤੇ ਮੋਡਿਊਲੇਟ ਕੀਤਾ ਜਾਣਾ ਹੈ।
ਪੋਸਟ ਸਮਾਂ: ਜੂਨ-16-2025