




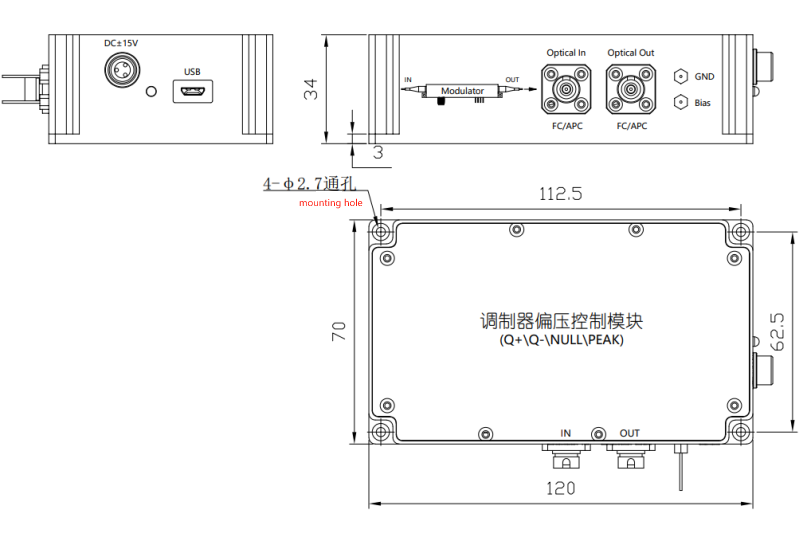
Rof Bias Point Controller automatic bias control module of lithium niobate MZ modulator

Feature
Multiple bias operating modes are available (Quad+↔Quad-, Min ↔Max)
Serial communication, programmed automatic fine tuning and locking bias points
Internal component beamers support a variety of wavelengths
Module package, adapter power supply

Application
Optical fiber communication
Microwave photon
Pulsed light application
Performance
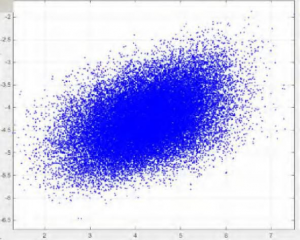
Figure 1. Constellation (without controller)
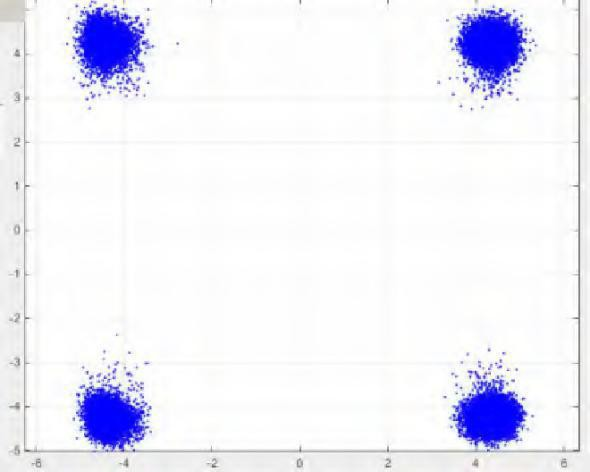
Figure 2. QPSK Constellation(with controller
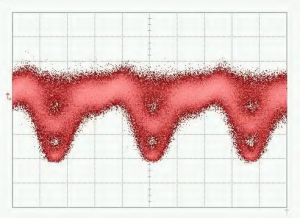
Figure 3. QPSK-Eye pattern
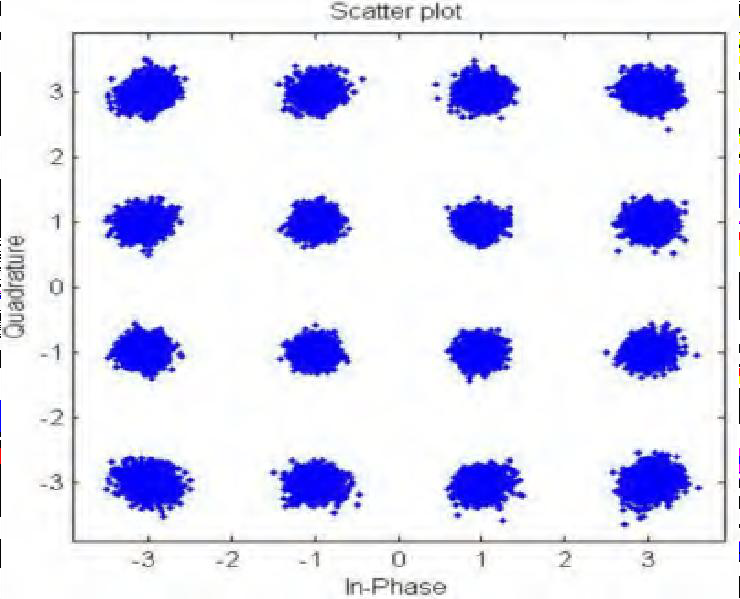
Figure 5. 16-QAM Constellation pattern
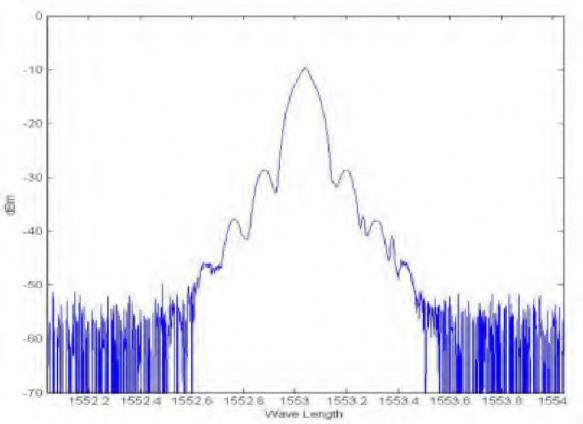
Figure 4. QPSK Spectrum
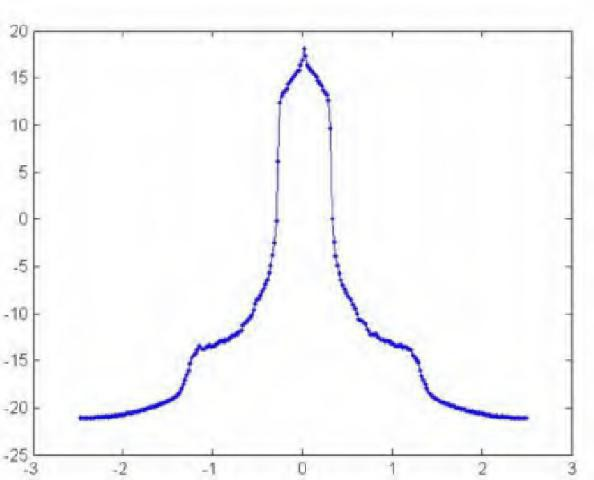
Figure 6. 16-QAM Spectrum
Specifications
|
Argument |
Min |
Typical |
Max |
Unit |
| Optical parameter | ||||
| Input optical power 1* |
0 |
13 |
dBm |
|
| Operating wavelength 2* |
780 |
1650 |
nm |
|
| Optical fiber interface |
FC/APC |
|||
| Electrical parameter | ||||
| Bias voltage |
-10 |
10 |
V |
|
| Switch extinction ratio 3* |
20 |
25 |
50 |
dB |
| Mode-locked region |
Positive or Negative |
|||
| Lock mode |
Quad+ (Quad-) or Min (Max) |
|||
| Modulation depth (QUAD) |
1 |
2 |
% |
|
| Modulation depth (Null) |
0.1 |
% |
||
| Pilot frequency (QUAD) |
1K |
Hz |
||
| Pilot frequency (NULL) |
2K |
Hz |
||
| Conventional parameter | ||||
| Dimensions (length × width × thickness) |
120×70×34 mm |
|||
| Operating temperature |
0 - 70℃ |
|||
Note:
1* refers to the power range input to the module when the modulator output is maximum. For the low point control of the modulator with a high extinction ratio, the input power should be appropriately increased; With special power input requirements, you can adjust the internal coupler and detector gain indicators, please consult sales when placing orders.
2* When placing an order, please specify the working wavelength, which needs to be optimized according to the working wavelength.
3* switching extinction ratio also depends on the switching extinction ratio level of the modulator itself.
Size drawing (mm)
Ordering information
*If you have any special requirements, please contact our sales staff
| ROF | ABC | Modulator type | XX | XX | XX |
| Automatic bias point control module | MZ---M-Z modulator | Working wavelength:
15---1550nm 13---1310nm 10---1064nm 08---850nm 07---780nm |
Fiber type:
S-- Single mode optical fiber P - polarization-maintaining fiber |
Optical fiber interface:
FA—FC/APC FP---FC/UPC |
User Interface
| Group | Operation |
Explanation |
| Reset | Insert jumper and pull out after 1 second | Reset the controller |
| Power | Power source for bias controller | V- connects the negative electrode of the power supply |
| V+ connects the positive electrode of the power supply | ||
| Middle port connects with the ground electrode | ||
| Polar1 | PLRI: Insert or pull out the jumper | no jumper: Null mode; with jumper: Peak mode |
| PLRQ: Insert or pull out the jumper | no jumper: Null mode; with jumper: Peak mode | |
| PLRP: Insert or pull out the jumper | no jumper: Q+ mode; with jumper: Q- mode | |
| LED | Constantly on | Working under stable state |
| On-off or off-on every 0.2s | Processing data and searching for controlling point | |
| On-off or off-on every 1s | Input optical power is too weak | |
| On-off or off-on every 3s | Input optical power is too strong | |
| PD 2 | Connect with the photodiode | PD port connects the Cathode of the photodiode |
| GND port connects the Anode of the photodiode | ||
| Bias Voltages | In, Ip: Bias voltage for I arm | Ip: Positive side; In: Negative side or ground |
| Qn, Qp: Bias voltage for Q arm | Qp: Positive side; Qn: Negative side or ground | |
| Pn, Pp: Bias voltage for P arm | Pp: Positive side; Pn: Negative side or ground | |
| UART | Operate controller via UART | 3.3: 3.3V reference voltage |
| GND: Ground | ||
| RX: Receive of controller | ||
| TX: Transmit of controller |
1 Polar depends on system RF signal. When there is no RF signal in the system, the polar should be positive. When RF signal has amplitude greater than a certain level, the polar will change from positive into negative. At this time, Null point and Peak point will switch with each other.Q+ point and Q- point will switch with each other as well.Polar switch enables user to change the polar
directly without changing operation points.
2 Only one choice shall be chosen between using controller photodiode or using modulator photodiode. It is recommended to use controller photodiode for Lab experiments for two reasons. Firstly, controller photodiode has ensured qualities. Secondly, it is easier to adjust the input light intensity.If using modulator’s internal photodiode, please make sure that the output current of photodiode is strictly proportional to input power.
Rofea Optoelectronics offers a product line of commercial Electro-optic modulators, Phase modulators, Intensity modulator, Photodetectors, Laser light sources, DFB lasers,Optical amplifiers, EDFA, SLD laser, QPSK modulation, Pulse laser, Light detector, Balanced photodetector, Laser driver, Fiber optic amplifier, Optical power meter, Broadband laser, Tunable laser, Optical detector, Laser diode driver, Fiber amplifier. We also provide many particular modulators for customization, such as 1*4 array phase modulators, ultra-low Vpi, and ultra-high extinction ratio modulators, primarily used in universities and institutes.
Hope our products will be helpful to you and your research.


