




ਅਲਟਰਾ ਕੰਪੈਕਟ ਡੀਪੀ-ਆਈਕਿਊ ਮੋਡੂਲੇਟਰ ਬਿਆਸ ਕੰਟਰੋਲਰ ਆਟੋਮੈਟਿਕ ਬਿਆਸ ਕੰਟਰੋਲਰ


ਵਿਸ਼ੇਸ਼ਤਾ
• ਦੋਹਰੇ ਧਰੁਵੀਕਰਨ IQ ਮਾਡਿਊਲੇਟਰਾਂ ਲਈ ਇੱਕੋ ਸਮੇਂ ਛੇ ਆਟੋਮੈਟਿਕ ਬਾਈਸ ਵੋਲਟੇਜ ਪ੍ਰਦਾਨ ਕਰਦਾ ਹੈ।
• ਸੁਤੰਤਰ ਮੋਡੂਲੇਸ਼ਨ ਫਾਰਮੈਟ:
SSB, QPSK, QAM, OFDM ਪ੍ਰਮਾਣਿਤ।
• ਪਲੱਗ ਐਂਡ ਪਲੇ:
ਕਿਸੇ ਮੈਨੂਅਲ ਕੈਲੀਬ੍ਰੇਸ਼ਨ ਦੀ ਲੋੜ ਨਹੀਂ ਹੈ ਸਭ ਕੁਝ ਆਟੋਮੈਟਿਕ ਹੈ
•I, Q ਹਥਿਆਰ: ਪੀਕ ਅਤੇ ਨਲ ਮੋਡਾਂ 'ਤੇ ਕੰਟਰੋਲ ਉੱਚ ਐਕਸਟੈਂਸ਼ਨ ਅਨੁਪਾਤ: 50dB ਅਧਿਕਤਮ1
•P ਬਾਂਹ: Q+ ਅਤੇ Q- ਮੋਡਾਂ 'ਤੇ ਕੰਟਰੋਲ ਸ਼ੁੱਧਤਾ: ± 2◦
•ਘੱਟ ਪ੍ਰੋਫਾਈਲ: 40mm(W) × 29mm(D) ×8mm(H)
• ਉੱਚ ਸਥਿਰਤਾ: ਪੂਰੀ ਤਰ੍ਹਾਂ ਡਿਜੀਟਲ ਲਾਗੂਕਰਨ ਵਰਤੋਂ ਵਿੱਚ ਆਸਾਨ:
• ਮਿੰਨੀ ਜੰਪਰ 2 ਨਾਲ ਮੈਨੂਅਲ ਓਪਰੇਸ਼ਨ
UART /IO ਰਾਹੀਂ ਲਚਕਦਾਰ OEM ਕਾਰਜ
• ਬਾਈਸ ਵੋਲਟੇਜ ਪ੍ਰਦਾਨ ਕਰਨ ਲਈ ਦੋ ਮੋਡ: a. ਆਟੋਮੈਟਿਕ ਬਾਈਸ ਕੰਟਰੋਲ b. ਯੂਜ਼ਰ ਦੁਆਰਾ ਪਰਿਭਾਸ਼ਿਤ ਬਾਈਸ ਵੋਲਟੇਜ

ਐਪਲੀਕੇਸ਼ਨ
•LiNbO3 ਅਤੇ ਹੋਰ DP-IQ ਮਾਡਿਊਲੇਟਰ
• ਸੁਮੇਲ ਸੰਚਾਰ
1ਸਭ ਤੋਂ ਵੱਧ ਵਿਨਾਸ਼ ਅਨੁਪਾਤ ਸਿਸਟਮ ਮਾਡਿਊਲੇਟਰ ਦੇ ਵੱਧ ਤੋਂ ਵੱਧ ਵਿਨਾਸ਼ ਅਨੁਪਾਤ 'ਤੇ ਨਿਰਭਰ ਕਰਦਾ ਹੈ ਅਤੇ 1 ਤੋਂ ਵੱਧ ਨਹੀਂ ਹੋ ਸਕਦਾ।
2UART ਓਪਰੇਸ਼ਨ ਸਿਰਫ਼ ਕੰਟਰੋਲਰ ਦੇ ਕੁਝ ਸੰਸਕਰਣ 'ਤੇ ਉਪਲਬਧ ਹੈ।
ਪ੍ਰਦਰਸ਼ਨ
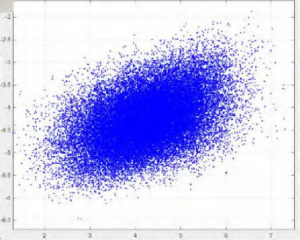
ਚਿੱਤਰ 1. ਤਾਰਾਮੰਡਲ (ਕੰਟਰੋਲਰ ਤੋਂ ਬਿਨਾਂ)
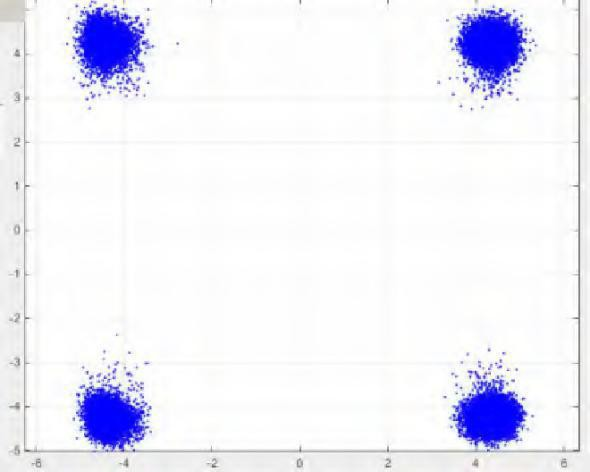
ਚਿੱਤਰ 2. QPSK ਤਾਰਾਮੰਡਲ (ਕੰਟਰੋਲਰ ਦੇ ਨਾਲ)
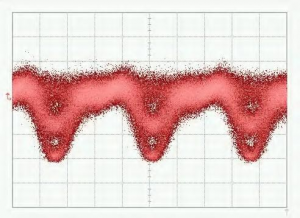
ਚਿੱਤਰ 3. QPSK-ਅੱਖ ਪੈਟਰਨ
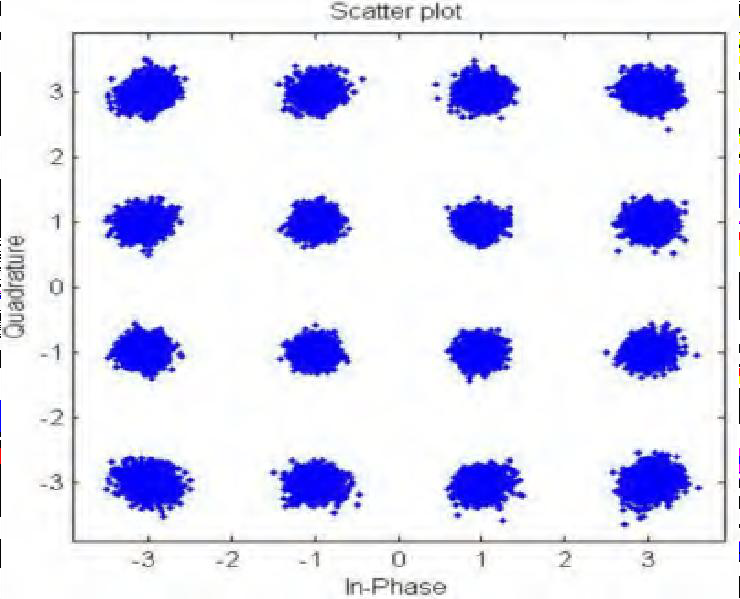
ਚਿੱਤਰ 5. 16-QAM ਤਾਰਾਮੰਡਲ ਪੈਟਰਨ
ਚਿੱਤਰ 4. QPSK ਸਪੈਕਟ੍ਰਮ

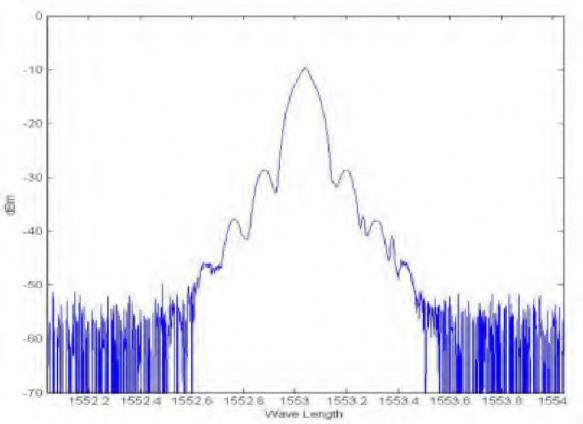
ਚਿੱਤਰ 6. CS-SSB ਸਪੈਕਟ੍ਰਮ
ਨਿਰਧਾਰਨ
| ਪੈਰਾਮੀਟਰ | ਘੱਟੋ-ਘੱਟ | ਕਿਸਮ | ਵੱਧ ਤੋਂ ਵੱਧ | ਯੂਨਿਟ |
| ਕੰਟਰੋਲ ਪ੍ਰਦਰਸ਼ਨ | ||||
| I, Q ਹਥਿਆਰਾਂ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈਖਾਲੀ (ਘੱਟੋ-ਘੱਟ)or ਸਿਖਰ (ਵੱਧ ਤੋਂ ਵੱਧ)ਬਿੰਦੂ | ||||
| ਵਿਨਾਸ਼ ਅਨੁਪਾਤ | ਐਮਈਆਰ1 | 50 | dB | |
| ਪੀ ਆਰਮ ਨੂੰ ਕੰਟਰੋਲ ਕੀਤਾ ਜਾਂਦਾ ਹੈQ+(ਸੱਜਾ ਚਤੁਰਭੁਜ)or Q-( ਖੱਬਾ ਚਤੁਰਭੁਜ)ਬਿੰਦੂ | ||||
| ਕਵਾਡ 'ਤੇ ਸ਼ੁੱਧਤਾ | -2 | +2 | ਡਿਗਰੀ2 | |
| ਸਥਿਰਤਾ ਸਮਾਂ | 45 | 50 | 55 | s |
| ਇਲੈਕਟ੍ਰੀਕਲ | ||||
| ਸਕਾਰਾਤਮਕ ਪਾਵਰ ਵੋਲਟੇਜ | +14.5 | +15 | +15.5 | V |
| ਸਕਾਰਾਤਮਕ ਪਾਵਰ ਕਰੰਟ | 20 | 30 | mA | |
| ਨਕਾਰਾਤਮਕ ਪਾਵਰ ਵੋਲਟੇਜ | -15.5 | -15 | -14.5 | V |
| ਨਕਾਰਾਤਮਕ ਪਾਵਰ ਕਰੰਟ | 8 | 15 | mA | |
| YI/YQ/XI/XQ ਦੀ ਆਉਟਪੁੱਟ ਵੋਲਟੇਜ ਰੇਂਜ | -14.5 | +14.5 | V | |
| YP/XP ਦੀ ਆਉਟਪੁੱਟ ਵੋਲਟੇਜ ਰੇਂਜ | -13 | +13 | V | |
| ਡਿਥਰ ਐਪਲੀਟਿਊਡ | 1%Vπ | V | ||
| ਆਪਟੀਕਲ | ||||
| ਇਨਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ3 | -30 | -8 | ਡੀਬੀਐਮ | |
| ਇਨਪੁੱਟ ਤਰੰਗ-ਲੰਬਾਈ | 1100 | 1650 | nm | |
1 MER ਅੰਦਰੂਨੀ ਮਾਡਿਊਲੇਟਰ ਐਕਸਟਿੰਕਸ਼ਨ ਰੇਸ਼ੋ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ। ਪ੍ਰਾਪਤ ਕੀਤਾ ਐਕਸਟੈਂਸ਼ਨ ਅਨੁਪਾਤ ਆਮ ਤੌਰ 'ਤੇ ਮੋਡਿਊਲੇਟਰ ਡੇਟਾਸ਼ੀਟ ਵਿੱਚ ਦਰਸਾਏ ਗਏ ਮੋਡਿਊਲੇਟਰ ਦਾ ਐਕਸਟੈਂਸ਼ਨ ਅਨੁਪਾਤ ਹੁੰਦਾ ਹੈ।
2ਆਓVπ 180 'ਤੇ ਬਾਈਸ ਵੋਲਟੇਜ ਨੂੰ ਦਰਸਾਓ◦ ਅਤੇVP ਕਵਾਡ ਪੁਆਇੰਟਾਂ 'ਤੇ ਸਭ ਤੋਂ ਅਨੁਕੂਲਿਤ ਬਾਈਸ ਵੋਲਟੇਜ ਨੂੰ ਦਰਸਾਓ।
3ਕਿਰਪਾ ਕਰਕੇ ਧਿਆਨ ਦਿਓ ਕਿ ਇਨਪੁਟ ਆਪਟੀਕਲ ਪਾਵਰ ਚੁਣੇ ਹੋਏ ਬਾਈਸ ਪੁਆਇੰਟ 'ਤੇ ਆਪਟੀਕਲ ਪਾਵਰ ਦਾ ਹਵਾਲਾ ਨਹੀਂ ਦਿੰਦਾ। ਇਹ ਵੱਧ ਤੋਂ ਵੱਧ ਆਪਟੀਕਲ ਪਾਵਰ ਹੈ ਜੋ ਮੋਡਿਊਲੇਟਰ ਕੰਟਰੋਲਰ ਨੂੰ ਨਿਰਯਾਤ ਕਰ ਸਕਦਾ ਹੈ ਜਦੋਂ ਬਾਈਸ ਵੋਲਟੇਜ-Vπ ਤੋਂ +Vπ .
ਯੂਜ਼ਰ ਇੰਟਰਫੇਸ
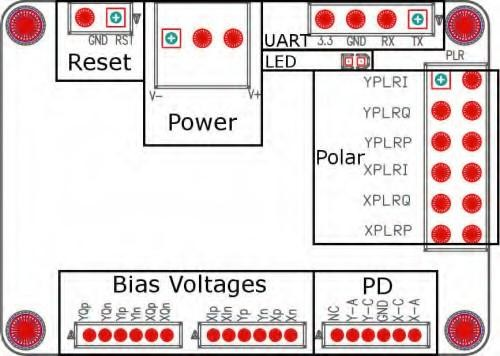
ਚਿੱਤਰ 5. ਅਸੈਂਬਲੀ
| ਸਮੂਹ | ਓਪਰੇਸ਼ਨ | ਵਿਆਖਿਆ |
| ਆਰਾਮ | ਜੰਪਰ ਪਾਓ ਅਤੇ 1 ਸਕਿੰਟ ਬਾਅਦ ਬਾਹਰ ਕੱਢੋ। | ਕੰਟਰੋਲਰ ਰੀਸੈਟ ਕਰੋ |
| ਪਾਵਰ | ਪੱਖਪਾਤ ਕੰਟਰੋਲਰ ਲਈ ਪਾਵਰ ਸਰੋਤ | V- ਪਾਵਰ ਸਪਲਾਈ ਦੇ ਨਕਾਰਾਤਮਕ ਇਲੈਕਟ੍ਰੋਡ ਨੂੰ ਜੋੜਦਾ ਹੈ |
| V+ ਪਾਵਰ ਸਪਲਾਈ ਦੇ ਸਕਾਰਾਤਮਕ ਇਲੈਕਟ੍ਰੋਡ ਨੂੰ ਜੋੜਦਾ ਹੈ | ||
| ਵਿਚਕਾਰਲਾ ਪੋਰਟ ਜ਼ਮੀਨੀ ਇਲੈਕਟ੍ਰੋਡ ਨਾਲ ਜੁੜਦਾ ਹੈ। | ||
| ਯੂਆਰਟੀ | UART ਰਾਹੀਂ ਕੰਟਰੋਲਰ ਚਲਾਓ | 3.3: 3.3V ਸੰਦਰਭ ਵੋਲਟੇਜ |
| GND: ਜ਼ਮੀਨ | ||
| RX: ਕੰਟਰੋਲਰ ਦੀ ਪ੍ਰਾਪਤੀ | ||
| TX: ਕੰਟਰੋਲਰ ਦਾ ਸੰਚਾਰ | ||
| ਅਗਵਾਈ | ਲਗਾਤਾਰ ਚਾਲੂ | ਸਥਿਰ ਸਥਿਤੀ ਵਿੱਚ ਕੰਮ ਕਰਨਾ |
| ਹਰ 0.2 ਸਕਿੰਟ ਬਾਅਦ ਚਾਲੂ-ਬੰਦ ਜਾਂ ਬੰਦ-ਚਾਲੂ | ਡੇਟਾ ਦੀ ਪ੍ਰਕਿਰਿਆ ਕਰਨਾ ਅਤੇ ਕੰਟਰੋਲਿੰਗ ਬਿੰਦੂ ਦੀ ਖੋਜ ਕਰਨਾ | |
| ਹਰ 1 ਸਕਿੰਟ ਬਾਅਦ ਚਾਲੂ-ਬੰਦ ਜਾਂ ਬੰਦ-ਬੰਦ | ਇਨਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਬਹੁਤ ਕਮਜ਼ੋਰ ਹੈ। | |
| ਹਰ 3 ਸਕਿੰਟ ਬਾਅਦ ਚਾਲੂ-ਬੰਦ ਜਾਂ ਬੰਦ-ਚਾਲੂ | ਇਨਪੁੱਟ ਆਪਟੀਕਲ ਪਾਵਰ ਬਹੁਤ ਜ਼ਿਆਦਾ ਹੈ। | |
| ਧਰੁਵੀ1 | XPLRI: ਜੰਪਰ ਪਾਓ ਜਾਂ ਬਾਹਰ ਕੱਢੋ | ਕੋਈ ਜੰਪਰ ਨਹੀਂ: ਨਲ ਮੋਡ; ਜੰਪਰ ਦੇ ਨਾਲ: ਪੀਕ ਮੋਡ |
| XPLRQ: ਜੰਪਰ ਪਾਓ ਜਾਂ ਬਾਹਰ ਕੱਢੋ | ਕੋਈ ਜੰਪਰ ਨਹੀਂ: ਨਲ ਮੋਡ; ਜੰਪਰ ਦੇ ਨਾਲ: ਪੀਕ ਮੋਡ | |
| XPLRP: ਜੰਪਰ ਪਾਓ ਜਾਂ ਬਾਹਰ ਕੱਢੋ | ਕੋਈ ਜੰਪਰ ਨਹੀਂ: Q+ ਮੋਡ; ਜੰਪਰ ਦੇ ਨਾਲ: Q- ਮੋਡ | |
| YPLRI: ਜੰਪਰ ਪਾਓ ਜਾਂ ਬਾਹਰ ਕੱਢੋ | ਕੋਈ ਜੰਪਰ ਨਹੀਂ: ਨਲ ਮੋਡ; ਜੰਪਰ ਦੇ ਨਾਲ: ਪੀਕ ਮੋਡ | |
| YPLRQ: ਜੰਪਰ ਪਾਓ ਜਾਂ ਬਾਹਰ ਕੱਢੋ | ਕੋਈ ਜੰਪਰ ਨਹੀਂ: ਨਲ ਮੋਡ; ਜੰਪਰ ਦੇ ਨਾਲ: ਪੀਕ ਮੋਡ | |
| YPLRP: ਜੰਪਰ ਪਾਓ ਜਾਂ ਬਾਹਰ ਕੱਢੋ | ਕੋਈ ਜੰਪਰ ਨਹੀਂ: Q+ ਮੋਡ; ਜੰਪਰ ਦੇ ਨਾਲ: Q- ਮੋਡ | |
| ਬਿਆਸ ਵੋਲਟੇਜ | YQp, YQn: Y ਧਰੁਵੀਕਰਨ Q ਬਾਂਹ ਲਈ ਪੱਖਪਾਤ | YQp: ਸਕਾਰਾਤਮਕ ਪੱਖ; YQn: ਨਕਾਰਾਤਮਕ ਪੱਖ ਜਾਂ ਜ਼ਮੀਨ |
| YIp, YIn: Y ਧਰੁਵੀਕਰਨ I ਬਾਂਹ ਲਈ ਪੱਖਪਾਤ | YIp: ਸਕਾਰਾਤਮਕ ਪੱਖ; YIn: ਨਕਾਰਾਤਮਕ ਪੱਖ ਜਾਂ ਜ਼ਮੀਨ | |
| XQp, XQn: X ਧਰੁਵੀਕਰਨ Q ਬਾਂਹ ਲਈ ਪੱਖਪਾਤ | XQp: ਸਕਾਰਾਤਮਕ ਪੱਖ; XQn: ਨਕਾਰਾਤਮਕ ਪੱਖ ਜਾਂ ਜ਼ਮੀਨ | |
| XIp, XIn: X ਧਰੁਵੀਕਰਨ I ਬਾਂਹ ਲਈ ਪੱਖਪਾਤ | XIp: ਸਕਾਰਾਤਮਕ ਪੱਖ; XIn: ਨਕਾਰਾਤਮਕ ਪੱਖ ਜਾਂ ਜ਼ਮੀਨ | |
| YPp, YPn: Y ਧਰੁਵੀਕਰਨ P ਬਾਂਹ ਲਈ ਪੱਖਪਾਤ | YPp: ਸਕਾਰਾਤਮਕ ਪੱਖ; YPn: ਨਕਾਰਾਤਮਕ ਪੱਖ ਜਾਂ ਜ਼ਮੀਨ | |
| XPp, XPn: X ਧਰੁਵੀਕਰਨ P ਬਾਂਹ ਲਈ ਪੱਖਪਾਤ | XPp: ਸਕਾਰਾਤਮਕ ਪੱਖ; XPn: ਨਕਾਰਾਤਮਕ ਪੱਖ ਜਾਂ ਜ਼ਮੀਨ |
1 ਪੋਲਰ ਸਿਸਟਮ RF ਸਿਗਨਲ 'ਤੇ ਨਿਰਭਰ ਕਰਦਾ ਹੈ। ਜਦੋਂ ਸਿਸਟਮ ਵਿੱਚ ਕੋਈ RF ਸਿਗਨਲ ਨਹੀਂ ਹੁੰਦਾ, ਤਾਂ ਪੋਲਰ ਸਕਾਰਾਤਮਕ ਹੋਣਾ ਚਾਹੀਦਾ ਹੈ। ਜਦੋਂ RF ਸਿਗਨਲ ਦਾ ਐਪਲੀਟਿਊਡ ਇੱਕ ਨਿਸ਼ਚਿਤ ਪੱਧਰ ਤੋਂ ਵੱਧ ਹੁੰਦਾ ਹੈ, ਤਾਂ ਪੋਲਰ ਸਕਾਰਾਤਮਕ ਤੋਂ ਨਕਾਰਾਤਮਕ ਵਿੱਚ ਬਦਲ ਜਾਵੇਗਾ। ਇਸ ਸਮੇਂ, ਨਲ ਪੁਆਇੰਟ ਅਤੇ ਪੀਕ ਪੁਆਇੰਟ ਇੱਕ ਦੂਜੇ ਨਾਲ ਬਦਲ ਜਾਣਗੇ। Q+ ਪੁਆਇੰਟ ਅਤੇ Q- ਪੁਆਇੰਟ ਵੀ ਇੱਕ ਦੂਜੇ ਨਾਲ ਬਦਲ ਜਾਣਗੇ। ਪੋਲਰ ਸਵਿੱਚ ਉਪਭੋਗਤਾ ਨੂੰ ਬਦਲਣ ਦੇ ਯੋਗ ਬਣਾਉਂਦਾ ਹੈ
ਓਪਰੇਸ਼ਨ ਪੁਆਇੰਟਾਂ ਨੂੰ ਬਦਲੇ ਬਿਨਾਂ ਸਿੱਧਾ ਪੋਲਰ।
| ਸਮੂਹ | ਓਪਰੇਸ਼ਨ | ਵਿਆਖਿਆ |
| PD1 | ਐਨਸੀ: ਜੁੜਿਆ ਨਹੀਂ ਹੈ | |
| YA: Y-ਪੋਲਰਾਈਜ਼ੇਸ਼ਨ ਫੋਟੋਡਾਇਓਡ ਐਨੋਡ | YA ਅਤੇ YC: Y ਧਰੁਵੀਕਰਨ ਫੋਟੋਕਰੰਟ ਫੀਡਬੈਕ | |
| YC: Y-ਪੋਲਰਾਈਜ਼ੇਸ਼ਨ ਫੋਟੋਡਾਇਓਡ ਕੈਥੋਡ | ||
| GND: ਜ਼ਮੀਨ | ||
| XC: X-ਪੋਲਰਾਈਜ਼ੇਸ਼ਨ ਫੋਟੋਡਾਇਓਡ ਕੈਥੋਡ | XA ਅਤੇ XC: X ਧਰੁਵੀਕਰਨ ਫੋਟੋਕਰੰਟ ਫੀਡਬੈਕ | |
| XA: X-ਪੋਲਰਾਈਜ਼ੇਸ਼ਨ ਫੋਟੋਡਾਇਓਡ ਐਨੋਡ |
1 ਕੰਟਰੋਲਰ ਫੋਟੋਡੀਓਡ ਦੀ ਵਰਤੋਂ ਜਾਂ ਮਾਡਿਊਲੇਟਰ ਫੋਟੋਡੀਓਡ ਦੀ ਵਰਤੋਂ ਕਰਨ ਵਿੱਚੋਂ ਸਿਰਫ਼ ਇੱਕ ਹੀ ਚੋਣ ਚੁਣੀ ਜਾਵੇਗੀ। ਦੋ ਕਾਰਨਾਂ ਕਰਕੇ ਲੈਬ ਪ੍ਰਯੋਗਾਂ ਲਈ ਕੰਟਰੋਲਰ ਫੋਟੋਡੀਓਡ ਦੀ ਵਰਤੋਂ ਕਰਨ ਦੀ ਸਿਫਾਰਸ਼ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਪਹਿਲਾਂ, ਕੰਟਰੋਲਰ ਫੋਟੋਡੀਓਡ ਵਿੱਚ ਗੁਣਾਂ ਨੂੰ ਯਕੀਨੀ ਬਣਾਇਆ ਗਿਆ ਹੈ। ਦੂਜਾ, ਇਨਪੁਟ ਲਾਈਟ ਤੀਬਰਤਾ ਨੂੰ ਐਡਜਸਟ ਕਰਨਾ ਆਸਾਨ ਹੈ। ਜੇਕਰ ਮਾਡਿਊਲੇਟਰ ਦੇ ਅੰਦਰੂਨੀ ਫੋਟੋਡੀਓਡ ਦੀ ਵਰਤੋਂ ਕਰ ਰਹੇ ਹੋ, ਤਾਂ ਕਿਰਪਾ ਕਰਕੇ ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਫੋਟੋਡੀਓਡ ਦਾ ਆਉਟਪੁੱਟ ਕਰੰਟ ਇਨਪੁਟ ਪਾਵਰ ਦੇ ਬਿਲਕੁਲ ਅਨੁਪਾਤੀ ਹੈ।
ਰੋਫੀਆ ਓਪਟੋਇਲੈਕਟ੍ਰੋਨਿਕਸ ਵਪਾਰਕ ਇਲੈਕਟ੍ਰੋ-ਆਪਟਿਕ ਮਾਡਿਊਲੇਟਰਾਂ, ਫੇਜ਼ ਮਾਡਿਊਲੇਟਰਾਂ, ਇੰਟੈਂਸਿਟੀ ਮਾਡਿਊਲੇਟਰ, ਫੋਟੋਡਿਟੈਕਟਰ, ਲੇਜ਼ਰ ਲਾਈਟ ਸੋਰਸ, ਡੀਐਫਬੀ ਲੇਜ਼ਰ, ਆਪਟੀਕਲ ਐਂਪਲੀਫਾਇਰ, ਈਡੀਐਫਏ, ਐਸਐਲਡੀ ਲੇਜ਼ਰ, ਕਿਊਪੀਐਸਕੇ ਮਾਡਿਊਲੇਸ਼ਨ, ਪਲਸ ਲੇਜ਼ਰ, ਲਾਈਟ ਡਿਟੈਕਟਰ, ਬੈਲੇਂਸਡ ਫੋਟੋਡਿਟੈਕਟਰ, ਲੇਜ਼ਰ ਡਰਾਈਵਰ, ਫਾਈਬਰ ਆਪਟਿਕ ਐਂਪਲੀਫਾਇਰ, ਆਪਟੀਕਲ ਪਾਵਰ ਮੀਟਰ, ਬ੍ਰੌਡਬੈਂਡ ਲੇਜ਼ਰ, ਟਿਊਨੇਬਲ ਲੇਜ਼ਰ, ਆਪਟੀਕਲ ਡਿਟੈਕਟਰ, ਲੇਜ਼ਰ ਡਾਇਓਡ ਡਰਾਈਵਰ, ਫਾਈਬਰ ਐਂਪਲੀਫਾਇਰ ਦੀ ਇੱਕ ਉਤਪਾਦ ਲਾਈਨ ਪੇਸ਼ ਕਰਦਾ ਹੈ। ਅਸੀਂ ਕਸਟਮਾਈਜ਼ੇਸ਼ਨ ਲਈ ਬਹੁਤ ਸਾਰੇ ਖਾਸ ਮਾਡਿਊਲੇਟਰ ਵੀ ਪ੍ਰਦਾਨ ਕਰਦੇ ਹਾਂ, ਜਿਵੇਂ ਕਿ 1*4 ਐਰੇ ਫੇਜ਼ ਮਾਡਿਊਲੇਟਰਾਂ, ਅਲਟਰਾ-ਲੋਅ ਵੀਪੀਆਈ, ਅਤੇ ਅਲਟਰਾ-ਹਾਈ ਐਕਸਟੈਂਸ਼ਨ ਰੇਸ਼ੋ ਮਾਡਿਊਲੇਟਰਾਂ, ਜੋ ਮੁੱਖ ਤੌਰ 'ਤੇ ਯੂਨੀਵਰਸਿਟੀਆਂ ਅਤੇ ਸੰਸਥਾਵਾਂ ਵਿੱਚ ਵਰਤੇ ਜਾਂਦੇ ਹਨ।
ਉਮੀਦ ਹੈ ਕਿ ਸਾਡੇ ਉਤਪਾਦ ਤੁਹਾਡੇ ਅਤੇ ਤੁਹਾਡੀ ਖੋਜ ਲਈ ਮਦਦਗਾਰ ਹੋਣਗੇ।


